CAN Bus Support from Vehicle Network Toolbox
Acquire CAN bus data directly into MATLAB or Simulink using CAN interface devices from Vector, Kvaser, PEAK-System, and National Instruments.
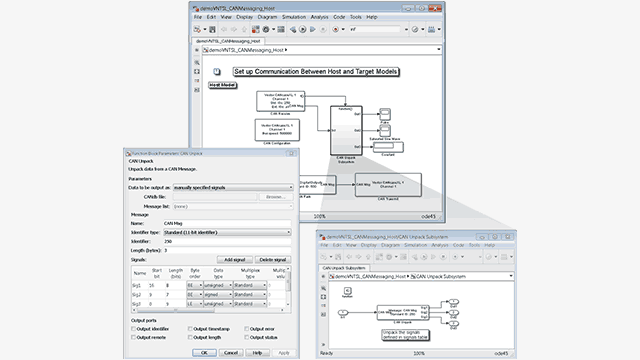
MATLAB and Vehicle Network Toolbox support sending and receiving messages via Controller Area Network (CAN) bus and provide support for CAN bus interfaces from multiple manufacturers. The toolbox also supports sending and receiving messages using XCP over CAN or Ethernet for calibration and validation of engine control units (ECUs).
This support provides you the flexibility to connect hardware from multiple manufacturers when creating MATLAB applications or Simulink models. You can also switch CAN bus interfaces with limited changes to your MATLAB code or Simulink model. The toolbox supports CAN bus interfaces that connect to your PC via USB, PCI, PCI-Express, PXI, and PCMCIA. From MATLAB and Simulink, the toolbox also supports sending and receiving CAN messages using CAN FD protocol if the CAN interface hardware supports this protocol.
Select a manufacturer to see the full list of CAN bus interfaces supported by Vehicle Network Toolbox:
- Kvaser
- National Instruments
- PEAK-System
- Vector
- Intrepid Control Systems (on Linux platform only using SocketCAN interface)
- CSS Electronics (Data Logger support via MDF files)