iopzmap
Plot pole-zero map for input-output pairs of dynamic system using default options
Description
iopzmap( plots the poles and zeros of
each input/output pair of the dynamic system model
sys)sys. In the plot, x and o
represent poles and zeros, respectively.
For model arrays, iopzmap plots the poles and zeros of each model
in the array on the same diagram.
Examples
Create a one-input, two-output dynamic system.
H = [tf(-5 ,[1 -1]); tf([1 -5 6],[1 1 0])];
Plot a pole-zero map.
iopzmap(H)
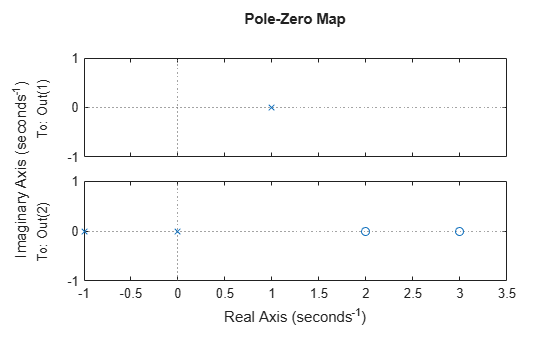
iopzmap generates a separate map for each I/O pair in the system.
View the poles and zeros of an over-parameterized state-space model estimated from input-output data. (Requires System Identification Toolbox™).
load iddata1 sys = ssest(z1,6,ssestOptions('focus','simulation')); iopzmap(sys)
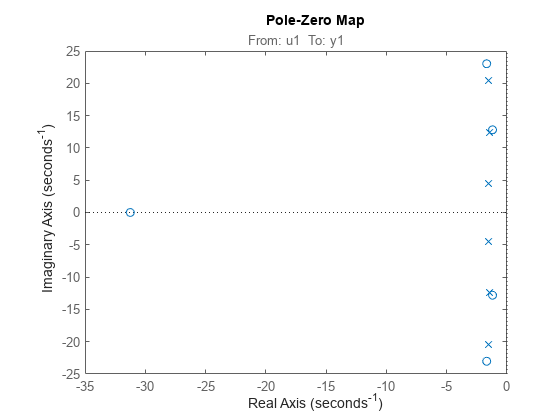
The plot shows that there are two pole-zero pairs that almost overlap, which hints are their potential redundancy.
Input Arguments
Tips
For additional options for customizing the appearance of the pole-zero plot, use
iopzplot.Plots created using
iopzmapdo not support multiline titles or labels specified as string arrays or cell arrays of character vectors. To specify multiline titles and labels, use a single string with anewlinecharacter.iopzmap(sys) title("first line" + newline + "second line");