Generate Images Using Diffusion
This example shows how to generate new images using a denoising diffusion probabilistic model (DDPM) [1].
Diffusion models learn to generate images using a training process with two main steps:
Forward diffusion — The model takes a clear image as input and iteratively adds noise to it. The model learns to capture the statistical patterns and dependencies within the data by observing the changes in the image as it adds noise.
Reverse diffusion — The model aims to reconstruct the original clear image from the noisy version. As the model knows the noise added at each step by the forward diffusion process, it can iteratively reverse the diffusion process. The model predicts the added noise and subtracts it from the image, gradually removing the noise and restoring the original clear image. The model learns to denoise the image by predicting the noise accurately.
Once you have trained the network, you can use it to generate new images by starting from random noise and successively removing the added noise that the network predicts.
The network in this example generates images that resemble any image in the training set. For an example showing how to train a conditional (or guided) diffusion model that generates images in a specific class, see Generate Images in Specific Class Using Guided Diffusion.

Load Data
Load the digits data as an image datastore using the imageDatastore function and specify the folder containing the image data.
dataFolder = fullfile(tempdir,"DigitsData"); unzip("DigitsData.zip",dataFolder); imds = imageDatastore(dataFolder,IncludeSubfolders=true);
Use an augmented image datastore to resize the images to have size 32-by-32 pixels.
imgSize = [32 32]; audsImds = augmentedImageDatastore(imgSize,imds);
Forward Diffusion Process
The forward diffusion (noising) process iteratively adds Gaussian noise to an image until the result is indistinguishable from random noise. At each noising step , add Gaussian noise using the equation:
where is the th noisy image and is the variance schedule. The variance schedule defines how the model adds noise to the images. In this example, define a variance schedule of 500 steps from to that increases linearly with .
numNoiseSteps = 500; betaMin = 1e-4; betaMax = 0.02; varianceSchedule = linspace(betaMin,betaMax,numNoiseSteps);
Apply the forward diffusion process on a test image. Extract a single image from the augmented image datastore and rescale it so that the pixel values are in the range [-1 1].
img = read(audsImds);
img = img{1,1};
img = img{:};
img = rescale(img,-1,1);Use the helper function applyNoiseToImage, defined at the end of this example, to apply increasing amounts of noise to the test image. To display the output at intermediate points, apply numNoiseSteps steps of noise to the image.
Starting from a clear image on the left, the diffusion process adds more noise until the final noising step where the image is indistinguishable from random noise.
tiledlayout("flow"); nexttile imshow(img,[]) title("t = 0"); for i = 1:5 nexttile noise = randn(size(img),like=img); noiseStepsToApply = numNoiseSteps/5 * i; noisyImg = applyNoiseToImage(img,noise,noiseStepsToApply,varianceSchedule); % Extract the data from the dlarray. noisyImg = extractdata(noisyImg); imshow(noisyImg,[]) title("t = " + string(noiseStepsToApply)); end

If you know the added noise at each step, then you can reverse the process exactly to recreate the original clear image. Then, if you know the exact statistical distribution of the images, you can perform the reverse process for any random noise to create an image drawn from the distribution of the training data.
The exact statistical distribution of the data set is too complicated to compute analytically. However, this example shows how to train a deep learning network to approximate it. Once you have trained the network, you can use it to generate new images by starting from random noise and successively removing the added noise that the network predicts (denoising).
Define Network
The diffusion network takes two inputs: an image input and a scalar feature input representing the number of noise steps added to the image. The network outputs a single image representing the noise that the model predicts has been added to the image.
The network architecture is based on the network used in [1]. The network is built around two types of repeating units:
Residual blocks
Attention blocks
The residual blocks perform convolution operations with skip connections.

The attention blocks perform self-attention operations with skip connections.

The network has an encoder-decoder structure similar to a U-Net [2]. The network repeatedly downsamples an input image to a lower resolution, processes it, and then repeatedly upsamples it to the original size. The network processes the inputs using residual blocks at each resolution. At resolutions of 16-by-16 and 8-by-8 pixels, the network uses attention blocks, which contain self-attention layers, to learn correlations between parts of the input image. To use self-attention layers, the network reshapes the activations using the custom SpatialFlattenLayer so that they have a single spatial dimension. After applying attention, the network reshapes the activations back to 2-D images using the custom SpatialUnflattenLayer. To access the SpatialFlattenLayer and SpatialUnflattenLayer layers, open this example as a live script.
The network encodes the noise step input using sinusoidal position encoding and adds it to each residual block. This allows the network to learn how to distinguish between different amounts of added noise. The network uses depth concatenation to combine the output of each downsampling residual block with the output of the complementary upsampling residual block.
To create the diffusion network, use the function createDiffusionNetwork, attached to this example as a supporting file. To access this function, open the example as a live script. This example uses grayscale images, which have one color channel. To train a network on RGB images, change the numInputChannels value to 3.
numInputChannels = 1; net = createDiffusionNetwork(numInputChannels)
net =
dlnetwork with properties:
Layers: [205×1 nnet.cnn.layer.Layer]
Connections: [244×2 table]
Learnables: [274×3 table]
State: [0×3 table]
InputNames: {'imageinput' 'input'}
OutputNames: {'conv_29'}
Initialized: 1
View summary with summary.
The full diffusion network has 205 layers. To see the network architecture, use Deep Network Designer.
deepNetworkDesigner(net)
Define Model Loss Function
Create the function modelLoss, listed in the Model Loss Function section of this example. The function takes as input the DDPM network, a mini-batch of noisy images with different amounts of noise applied, a mini-batch of noise step values corresponding to the amount of noise added to each image, and the corresponding target noise values.
Specify Training Options
Train with a mini-batch size of 128 for 50 epochs.
miniBatchSize = 128; numEpochs = 50;
Specify the options for Adam optimization:
A learning rate of 0.0005
A gradient decay factor of 0.9
A squared gradient decay factor of 0.9999
learnRate = 0.0005; gradientDecayFactor = 0.9; squaredGradientDecayFactor = 0.9999;
Train Model
Train the DDPM to predict the added noise for an image at the specified noise step. To train the model, in each epoch, shuffle the images and loop over the mini-batches. In each mini-batch, for each image:
Choose a random number of noise steps
Nbetween1andnumNoiseSteps.Generate a matrix of random noise the same size as the image and drawn from a standard normal distribution. This is the target that the network learns to predict.
Apply
Niterations of the target noise to the image.
Then, compute the model loss function between the network output and the actual noise added to the images, along with the gradients of the loss function. Update the learnable parameters of the network using gradient descent along the gradients of the loss function.
Training the model is a computationally expensive process that can take hours. To save time while running this example, load a pretrained network by setting doTraining to false. To train the network yourself, set doTraining to true.
doTraining = false;
Use a minibatchqueue object to process and manage the mini-batches of images. In each mini-batch, rescale the images so that the pixel values are in the range [-1 1] using the custom mini-batch preprocessing function preprocessMinibatch, defined at the end of this example.
mbq = minibatchqueue(audsImds, ... MiniBatchSize=miniBatchSize, ... MiniBatchFcn=@preprocessMiniBatch, ... MiniBatchFormat="SSCB", ... PartialMiniBatch="discard");
Initialize the parameters for Adam optimization.
averageGrad = []; averageSqGrad = [];
To track the model performance, use a trainingProgressMonitor object. Calculate the total number of iterations for the monitor.
numObservationsTrain = numel(imds.Files); numIterationsPerEpoch = ceil(numObservationsTrain/miniBatchSize); numIterations = numEpochs*numIterationsPerEpoch;
Initialize the TrainingProgressMonitor object. Because the timer starts when you create the monitor object, make sure that you create the object close to the training loop.
if doTraining monitor = trainingProgressMonitor(... Metrics="Loss", ... Info=["Epoch","Iteration"], ... XLabel="Iteration"); end
Train the network.
if doTraining iteration = 0; epoch = 0; while epoch < numEpochs && ~monitor.Stop epoch = epoch + 1; shuffle(mbq); while hasdata(mbq) && ~monitor.Stop iteration = iteration + 1; img = next(mbq); % Generate random noise. targetNoise = randn(size(img),Like=img); % Generate a random noise step. noiseStep = dlarray(randi(numNoiseSteps,[1 miniBatchSize],Like=img),"CB"); % Apply noise to the image. noisyImage = applyNoiseToImage(img,targetNoise,noiseStep,varianceSchedule); % Compute loss. [loss,gradients] = dlfeval(@modelLoss,net,noisyImage,noiseStep,targetNoise); % Update model. [net,averageGrad,averageSqGrad] = adamupdate(net,gradients,averageGrad,averageSqGrad,iteration, ... learnRate,gradientDecayFactor,squaredGradientDecayFactor); % Record metrics. recordMetrics(monitor,iteration,Loss=loss); updateInfo(monitor,Epoch=epoch,Iteration=iteration); monitor.Progress = 100 * iteration/numIterations; end % Generate and display a batch of generated images. numImages = 16; displayFrequency = numNoiseSteps + 1; generateAndDisplayImages(net,varianceSchedule,imgSize,numImages,numInputChannels,displayFrequency); end else % If doTraining is false, download and extract the pretrained network from the MathWorks website. pretrainedNetZipFile = matlab.internal.examples.downloadSupportFile('nnet','data/TrainedDiffusionNetwork.zip'); unzip(pretrainedNetZipFile); load("DiffusionNetworkTrained/DiffusionNetworkTrained.mat"); end
Generate New Images
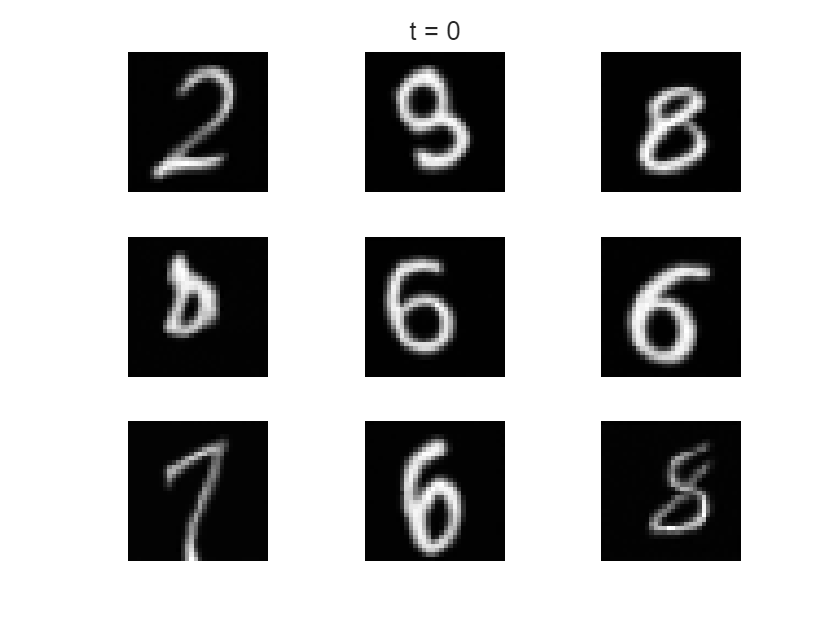
Use the supporting function generateImages to generate a batch of images using the trained network. Display intermediate images every 10 noise steps to show the denoising process in action.
The function starts with a random image and iterates through the diffusion process in reverse, predicting the noise at each step using the network and removing it. The function evaluates numNoiseSteps network predictions, so can take several minutes. Once complete, the network has generated new images.
numImages = 9; displayFrequency = 10; figure generatedImages = generateAndDisplayImages(net,varianceSchedule,imgSize,numImages,numInputChannels,displayFrequency);
References
Ho, Jonathan, Ajay Jain, and Pieter Abbeel. “Denoising Diffusion Probabilistic Models.” In Advances in Neural Information Processing Systems, 33:6840–51. Curran Associates, Inc., 2020. https://proceedings.neurips.cc/paper_files/paper/2020/file/4c5bcfec8584af0d967f1ab10179ca4b-Paper.pdf
Ronneberger, O., P. Fischer, and T. Brox. "U-Net: Convolutional Networks for Biomedical Image Segmentation." Medical Image Computing and Computer-Assisted Intervention (MICCAI). Vol. 9351, 2015, pp. 234–241.
Supporting Functions
Forward Noising Function
The forward noising function applyNoiseToImage takes as input an image img, a matrix of Gaussian noise noiseToApply, an integer noiseStep indicating the number of noise steps to apply to the image, and a variance schedule varianceSchedule, consisting of a vector of length numNoiseSteps.
At each step, the function applies random noise drawn from a standard normal distribution to an image using the following formula:
To speed up the process of generating noisy images, use the following equation to apply multiple noising steps at once:
where is the original image and .
function noisyImg = applyNoiseToImage(img,noiseToApply,noiseStep,varianceSchedule) alphaBar = cumprod(1 - varianceSchedule); alphaBarT = dlarray(alphaBar(noiseStep),"CBSS"); noisyImg = sqrt(alphaBarT).*img + sqrt(1 - alphaBarT).*noiseToApply; end
Model Loss Function
The model loss function takes as input the DDPM network net, a mini-batch of noisy input images X, a mini-batch of noise step values Y corresponding to the amount of noise added to each image, and the corresponding target noise values T. The function returns the loss and the gradients of the loss with respect to the learnable parameters in net.
function [loss, gradients] = modelLoss(net,X,Y,T) % Forward data through the network. noisePrediction = forward(net,X,Y); % Compute mean squared error loss between predicted noise and target. loss = mse(noisePrediction,T); gradients = dlgradient(loss,net.Learnables); end
Mini-batch Preprocessing Function
The preprocessMiniBatch function preprocesses the data using the following steps:
Extract the image data from the incoming cell array and concatenate into a numeric array.
Rescale the images to be in the range
[-1,1].
function X = preprocessMiniBatch(data) % Concatenate mini-batch. X = cat(4,data{:}); % Rescale the images so that the pixel values are in the range [-1 1]. X = rescale(X,-1,1,InputMin=0,InputMax=255); end
Image Generation Function
The generateImages function takes as input a trained DDPM network net, a variance schedule varianceSchedule, the image size imageSize and the number of desired images numImages. The function returns a batch of numImages images generated using the following reverse diffusion process:
Generate a noisy image consisting of Gaussian random noise the same size as the desired image, drawn from a standard normal distribution.
Use the network to predict the added noise .
Remove this noise from the image using the formula:
,
where the posterior variance is , and is a different matrix of Gaussian random noise.
4. Repeat steps 2-3 for each noise step, counting down from numNoiseSteps to 1.
function images = generateAndDisplayImages(net,varianceSchedule,imageSize,numImages,numChannels,displayFrequency) % Generate random noise. images = randn([imageSize numChannels numImages]); % Compute variance schedule parameters. alphaBar = cumprod(1 - varianceSchedule); alphaBarPrev = [1 alphaBar(1:end-1)]; posteriorVariance = varianceSchedule.*(1 - alphaBarPrev)./(1 - alphaBar); % Reverse the diffusion process. numNoiseSteps = length(varianceSchedule); for noiseStep = numNoiseSteps:-1:1 if noiseStep ~= 1 z = randn([imageSize,numChannels,numImages]); else z = zeros([imageSize,numChannels,numImages]); end % Predict the noise using the network. predictedNoise = predict(net,images,noiseStep); sqrtOneMinusBeta = sqrt(1 - varianceSchedule(noiseStep)); addedNoise = sqrt(posteriorVariance(noiseStep))*z; predNoise = varianceSchedule(noiseStep)*predictedNoise/sqrt(1 - alphaBar(noiseStep)); images = 1/sqrtOneMinusBeta*(images - predNoise) + addedNoise; % Display intermediate images. if mod(noiseStep,displayFrequency) == 0 tLay = tiledlayout("flow"); title(tLay,"t = "+ noiseStep) for ii = 1:numImages nexttile imshow(images(:,:,:,ii),[]) end drawnow end end % Display final images. tLay = tiledlayout("flow"); title(tLay,"t = 0") for ii = 1:numImages nexttile imshow(images(:,:,:,ii),[]) end end
See Also
dlnetwork | forward | predict | dlarray | dlgradient | dlfeval