Collision Avoidance Assistance
Collision avoidance is one of the fundamental functions in advanced driver assistance. The system employs techniques like forward collision warning, adaptive speed control, and autonomous emergency braking to prevent collisions between vehicles. To improve the accuracy of these techniques, the system collects the scenario data by using multiple types of sensors. The data recorded by the sensors are merged using sensor fusion methods and are used for decision making. These examples show how to develop and test different collision avoidance models by integrating perception, planning, and control techniques.
Topics
- Overview of Collision Avoidance System
Learn the basics of modeling and testing collision avoidance systems.
Featured Examples
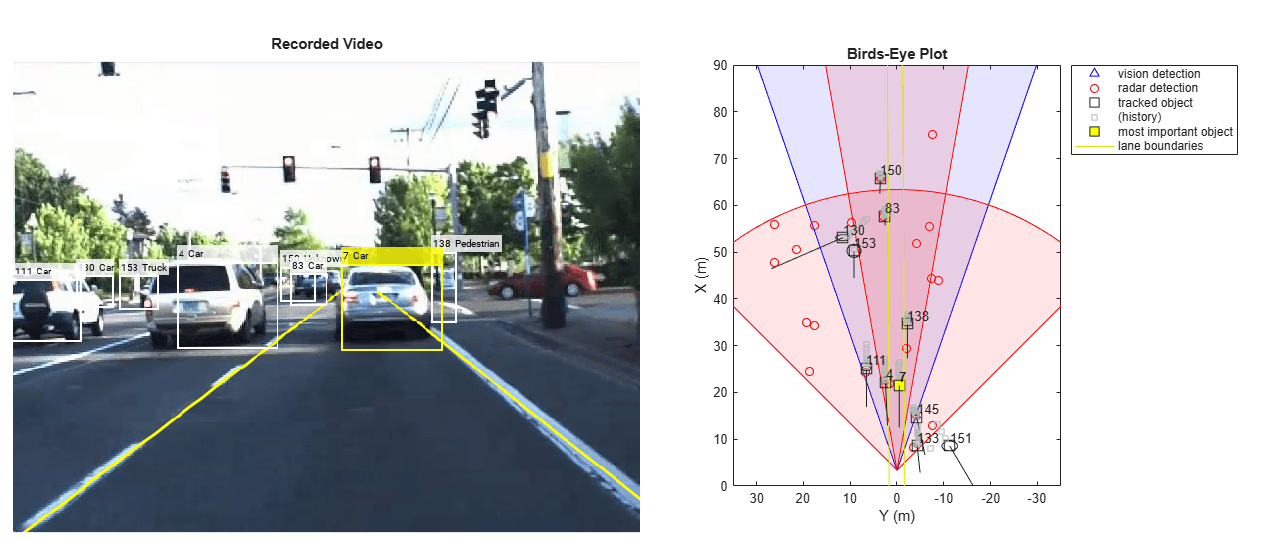
Forward Collision Warning Using Sensor Fusion
Perform forward collision warning by fusing data from vision and radar sensors to track objects in front of the vehicle.
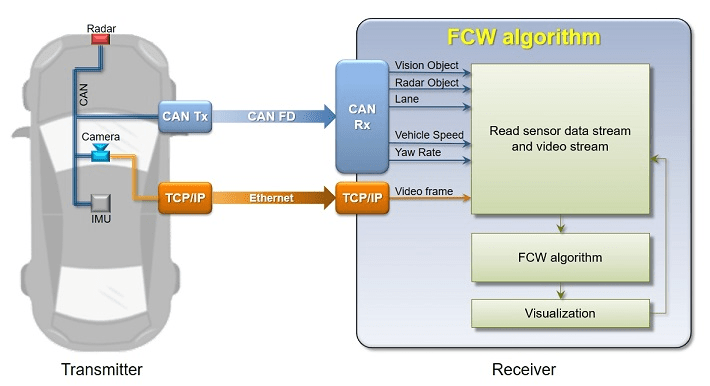
Forward Collision Warning Application with CAN FD and TCP/IP
Execute a forward collision warning application with sensor and vision data replayed live via CAN FD and TCP/IP protocols.
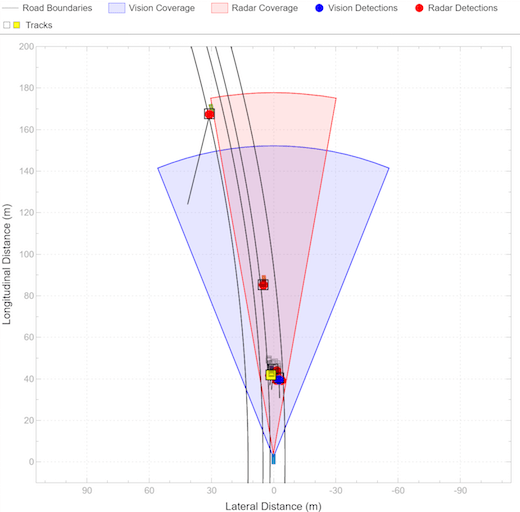
Adaptive Cruise Control with Sensor Fusion
Implement an automotive adaptive cruise controller using sensor fusion.
Autonomous Emergency Braking with Sensor Fusion
Implement autonomous emergency braking with a sensor fusion algorithm.
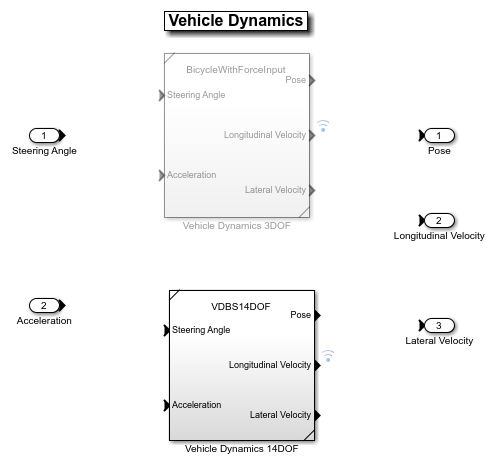
Autonomous Emergency Braking with Vehicle Variants
Simulate autonomous emergency braking application by integrating different fidelity vehicles.
Automate Testing for Autonomous Emergency Braking
Automate the testing of the components and generated code for autonomous emergency braking application.
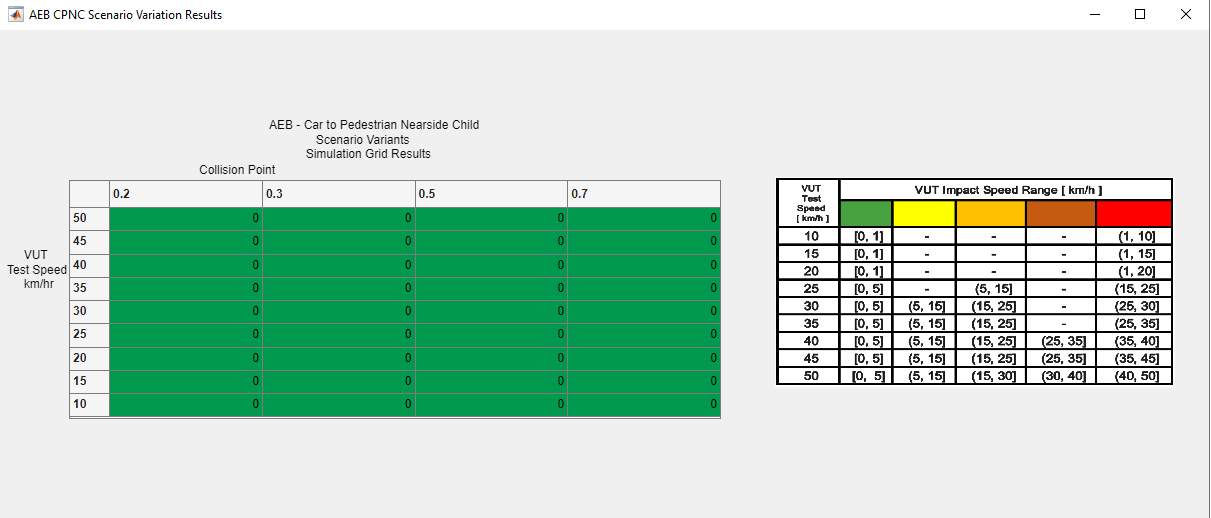
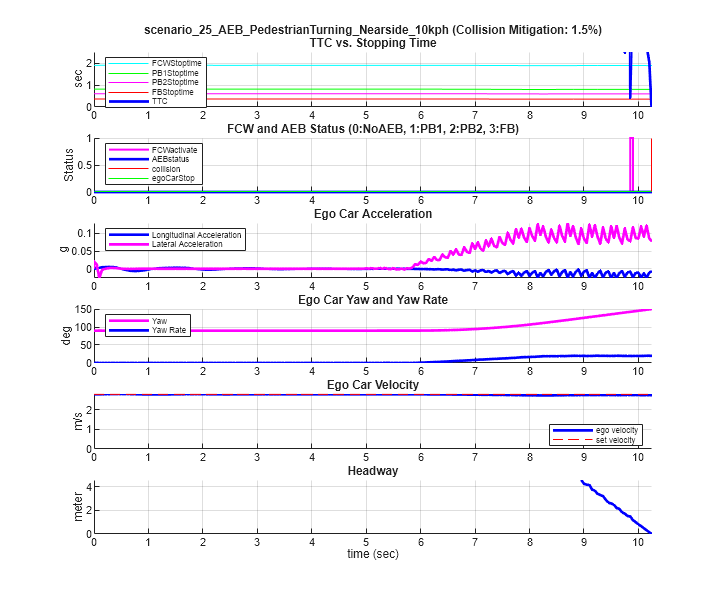
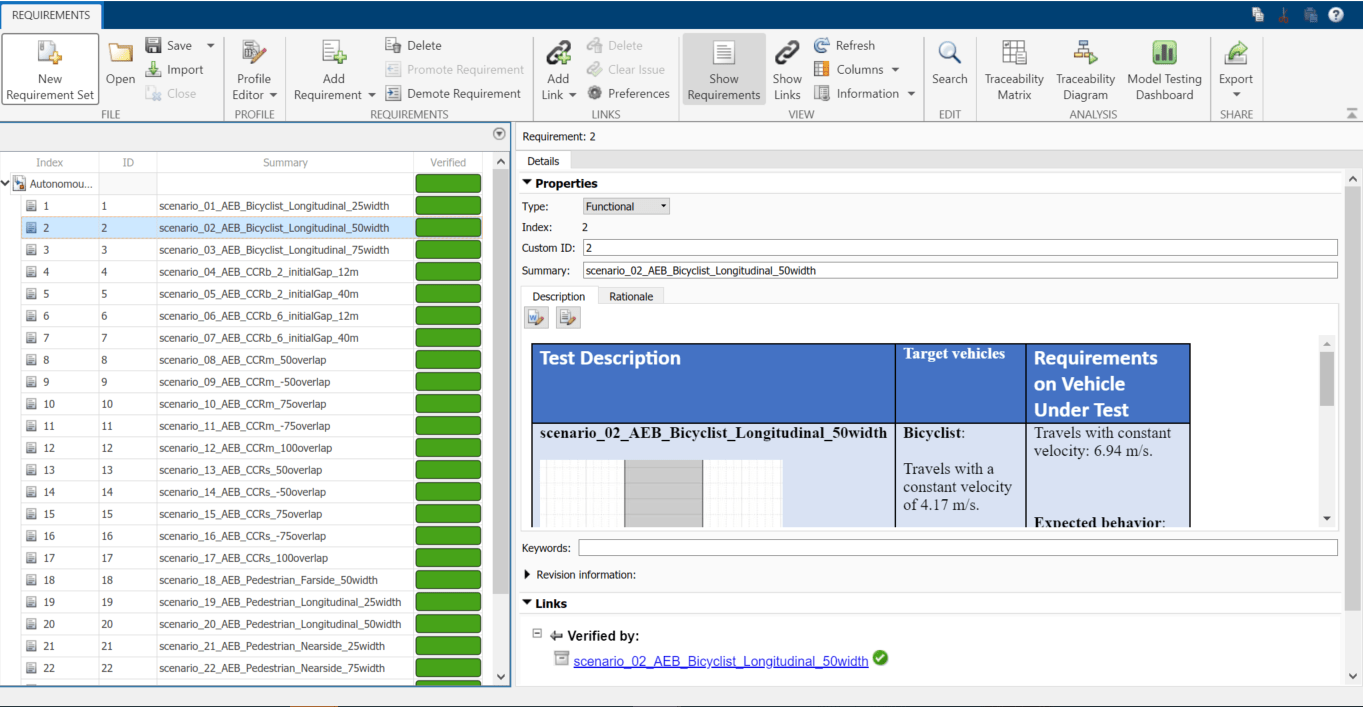
Automate Testing for Scenario Variants of AEB System
Automate the testing of autonomous emergency braking (AEB) application by varying the European New Car Assessment Programme (Euro NCAP) car-to-pedestrian nearside child driving scenario.
Autonomous Emergency Braking with High-Fidelity Vehicle Dynamics
Design autonomous emergency braking system with 14DOF vehicle dynamics in Simulink® and cosimulate with RoadRunner Scenario.
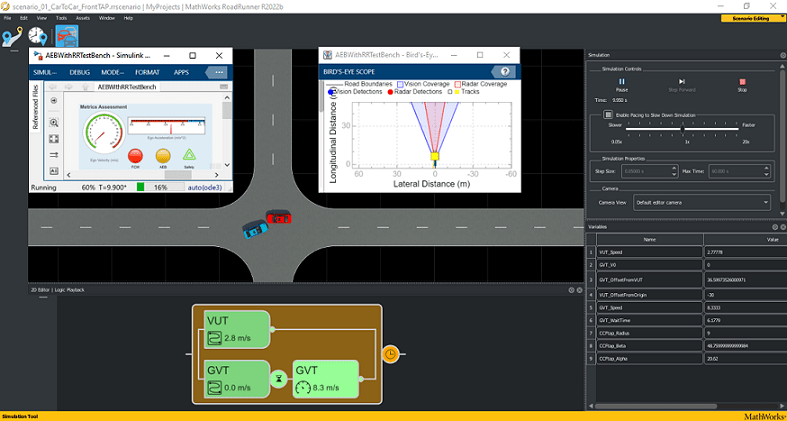
Autonomous Emergency Braking with RoadRunner Scenario
Simulate autonomous emergency braking (AEB) system, designed in Simulink, with RoadRunner Scenario.
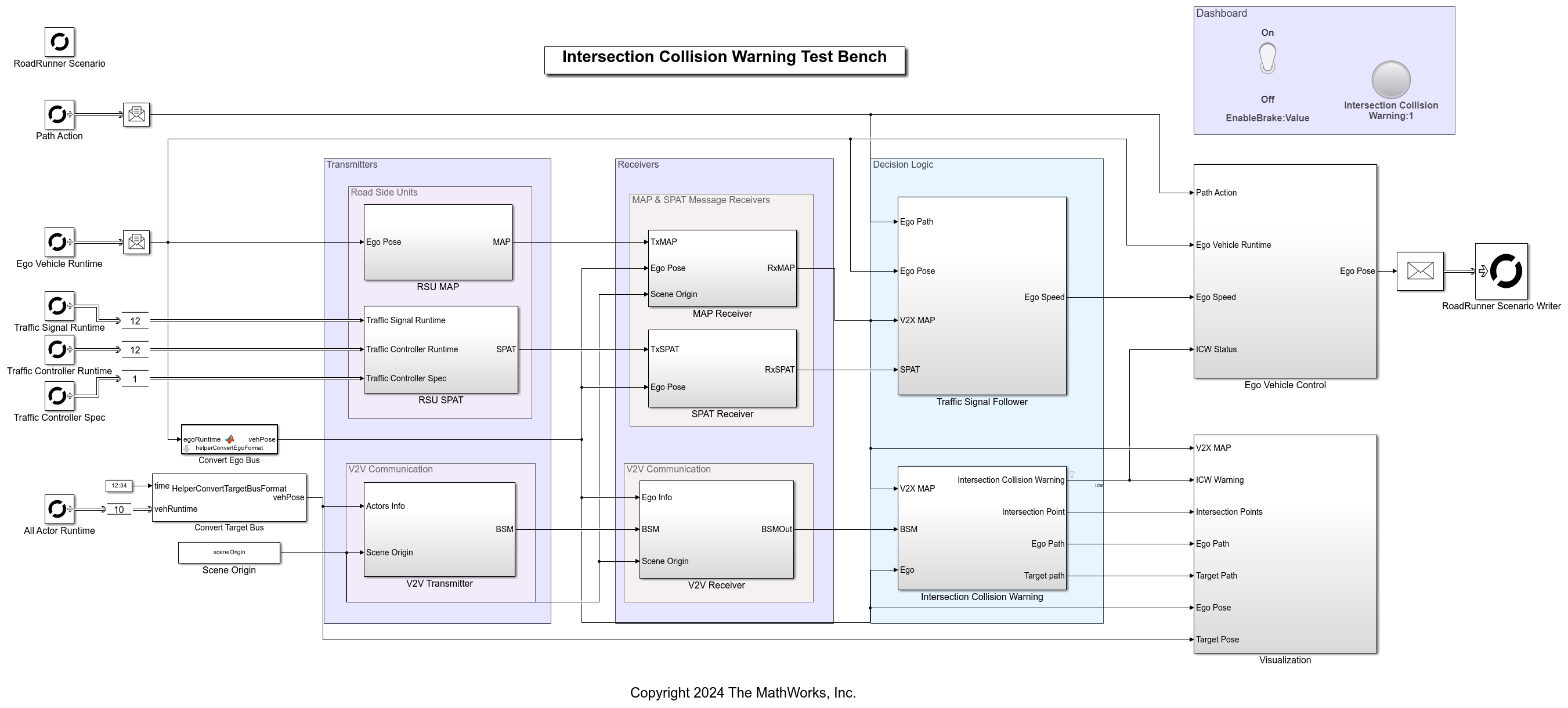
Intersection Collision Warning Using V2X Communication
Design a vehicle-to-everything (V2X) communication-based intersection collision warning system in Simulink and cosimulate it with RoadRunner Scenario.
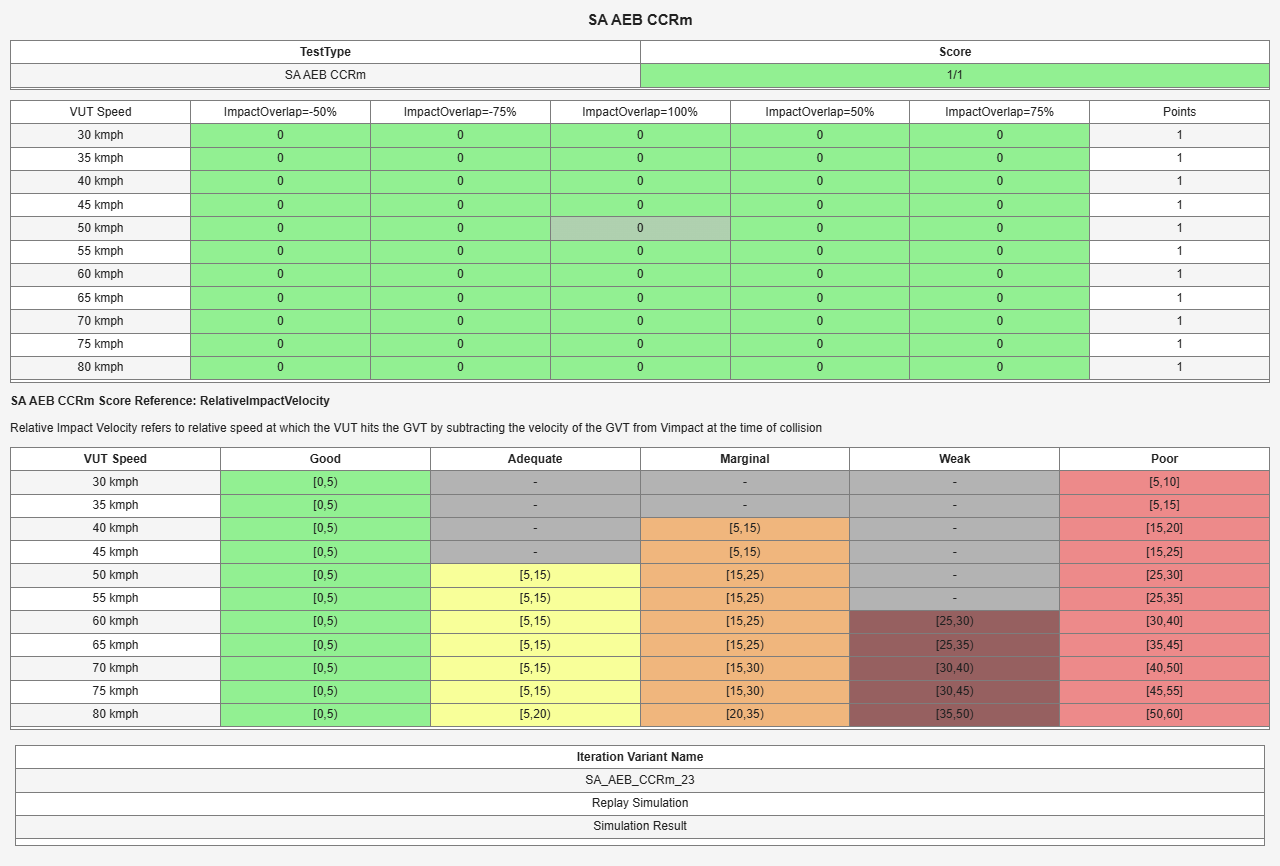
Euro NCAP Testing with RoadRunner Scenario
Assess functionality of AEB and LSS applications per Euro NCAP® testing protocols using iterative testing method.