Planning and Control
Automated Driving Toolbox™ provides these features that support path planning and vehicle control:
To plan driving paths, you can use a vehicle costmap and the optimal rapidly exploring random tree (RRT*) motion-planning algorithm. You can also check the validity of the path, smooth the path, and generate a velocity profile along the path.
To design vehicle control systems, you can use lateral and longitudinal controllers that enable autonomous vehicles to follow a planned trajectory.
To test vehicle controllers, you can use the 3-DOF rigid body bicycle model which accounts for aerodynamic drag and weight distribution between the axles.
Functions
Blocks
| Path Smoother Spline | Smooth vehicle path using cubic spline interpolation |
| Velocity Profiler | Generate velocity profile of vehicle path given kinematic constraints |
| Lateral Controller Stanley | Control steering angle of vehicle for path following by using Stanley method |
| Longitudinal Controller Stanley | Control longitudinal velocity of vehicle by using Stanley method |
| Bicycle Model | Implement a single track 3DOF rigid vehicle body to calculate longitudinal, lateral, and yaw motion |
Topics
- Lateral Control Tutorial
Control the steering angle of a vehicle following a planned path and perform lane changing.
- Code Generation for Path Planning and Vehicle Control
Generate C++ code for a path planning and vehicle control algorithm, and verify the code using software-in-the-loop simulation.
Featured Examples

Create Occupancy Grid Using Monocular Camera and Semantic Segmentation
Estimate free space and create an occupancy grid using semantic segmentation and deep learning.
Traffic Light Negotiation
Design and test decision logic for negotiating a traffic light at an intersection.
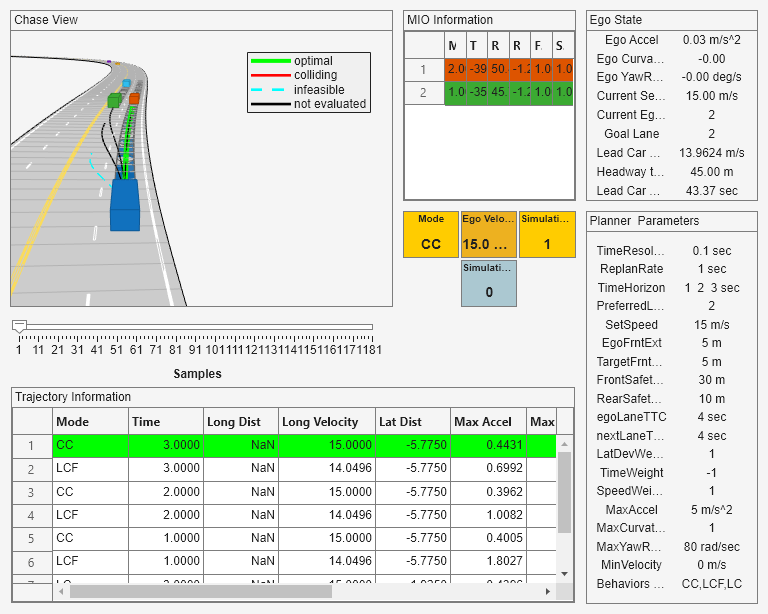
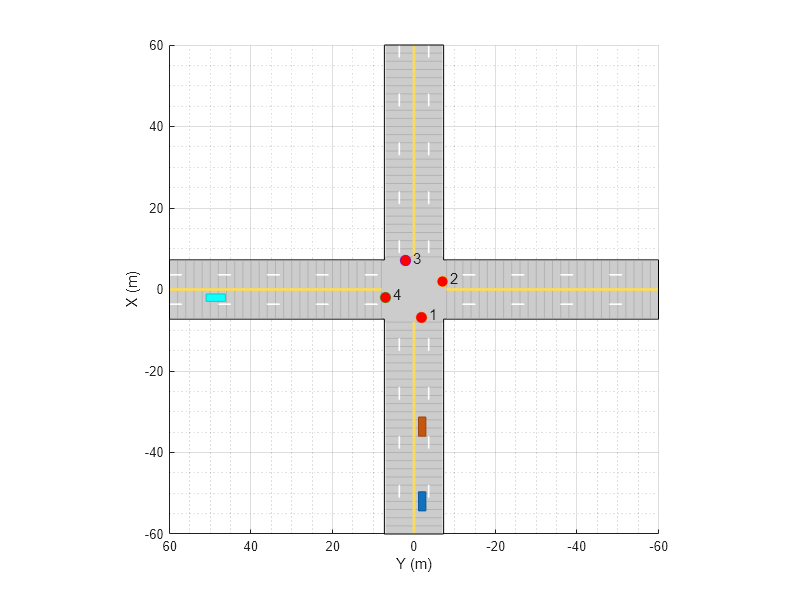
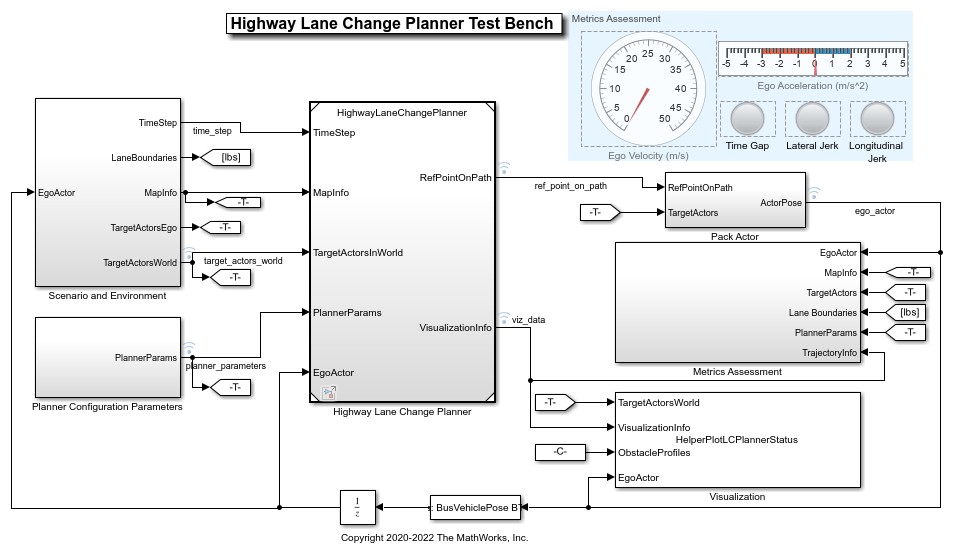
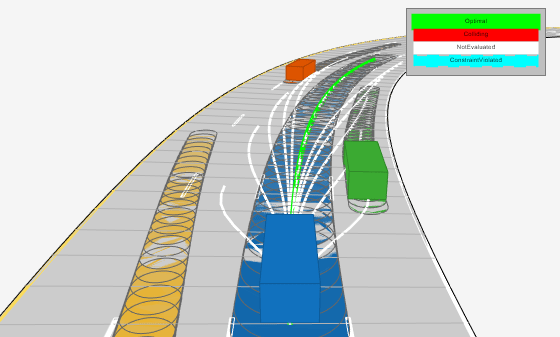
Highway Lane Change Planner and Controller
Design and test the planner and controller components of a lane change maneuver system designed for highway driving.
Generate Code for Highway Lane Change Planner
Generate code for a highway lane change planner and validate the functional equivalence with simulation.

Automate Testing for Highway Lane Change
Automate the testing of the components and generated code for highway lane change application.
Highway Trajectory Planning Using Frenet Reference Path
Plan a local trajectory in a highway driving scenario by using a reference path in Frenet coordinates and a dynamic list of obstacles.
Object Tracking and Motion Planning Using Frenet Reference Path
Dynamically replan the motion of an autonomous vehicle based on the estimate of the surrounding environment. You use a Frenet reference path and a joint probabilistic data association (JPDA) tracker to estimate and predict the motion of other vehicles on the highway. Compared to the Highway Trajectory Planning Using Frenet Reference Path example, you use these estimated trajectories from the multi-object tracker in this example instead of ground truth for motion planning.
Motion Planning in Urban Environments Using Dynamic Occupancy Grid Map
Perform dynamic replanning in an urban driving scene by using a grid-based tracker.
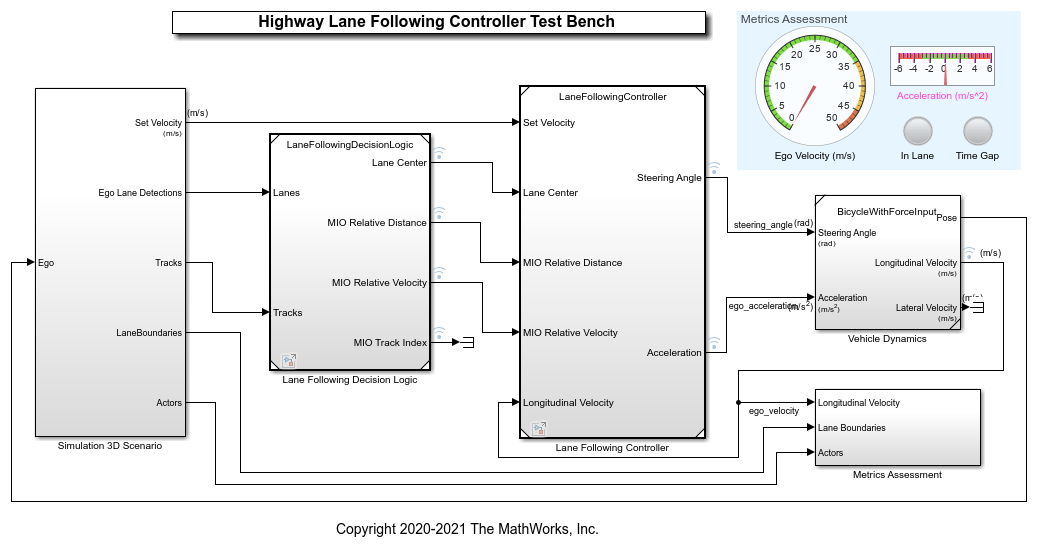
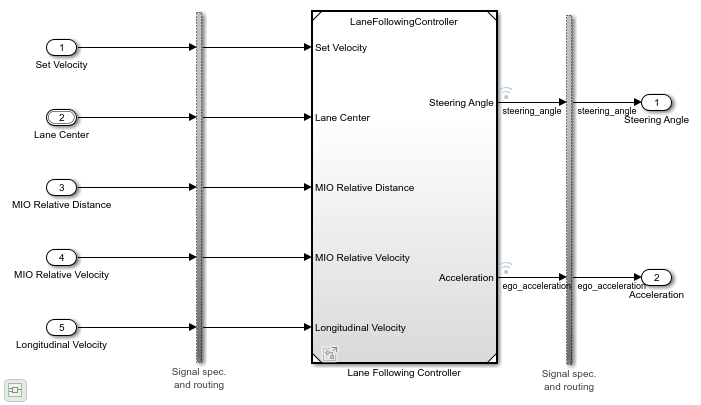
Generate Code for Highway Lane Following Controller
Generate code for the lane following decision logic and controller, and validate the functional equivalence by using software-in-the-loop (SIL) simulation.
Automate Testing for Highway Lane Following Controller
Automate the testing of a lane following controller and generated code for highway lane following application.
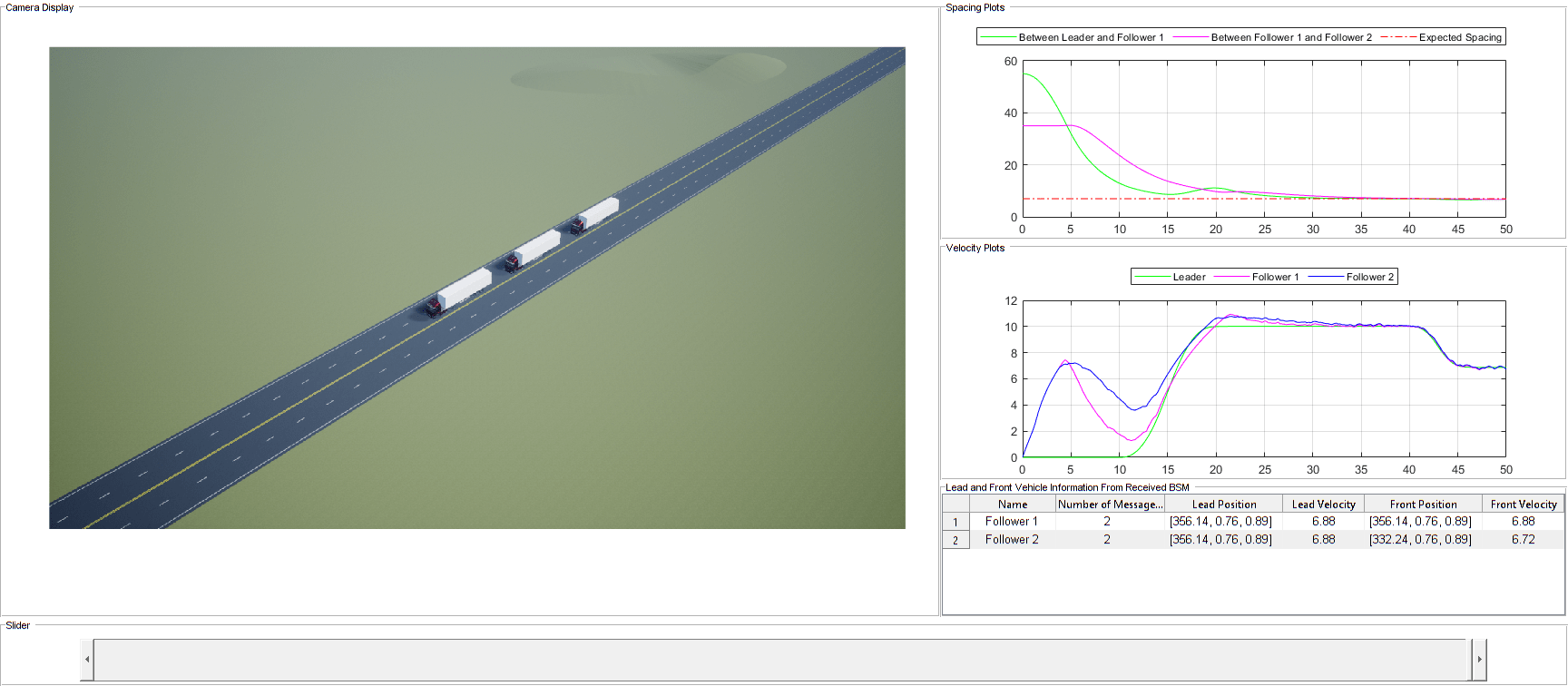
Truck Platooning Using Vehicle-to-Vehicle Communication
Simulate truck platooning application using V2V communication in Unreal Engine® simulation environment.
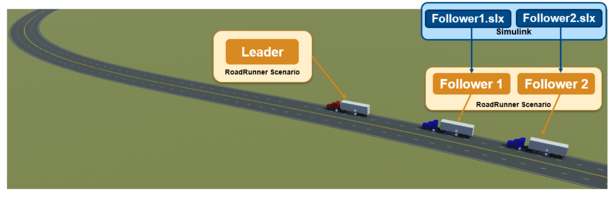
Truck Platooning with RoadRunner Scenario
Simulate truck platooning application, designed in Simulink®, with RoadRunner Scenario.
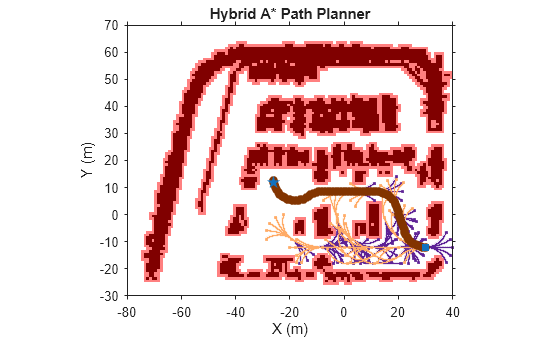
Path Planning Using 3D Lidar Map
Plan reference path for navigation of autonomous vehicle using normal distribution transform (NDT).
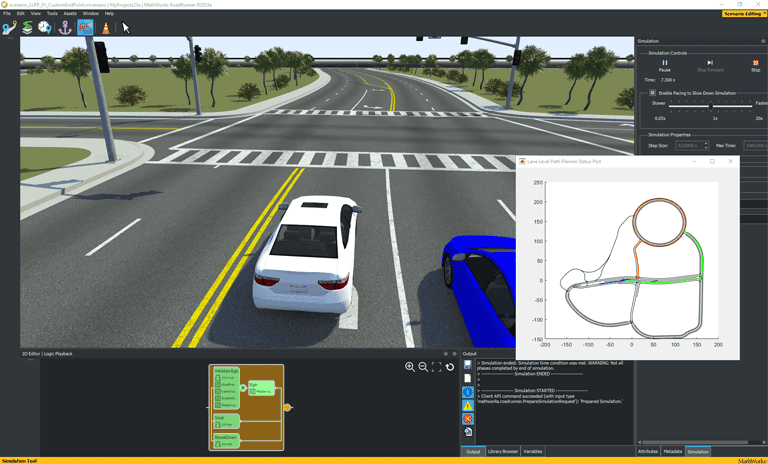
Lane-Level Path Planning with RoadRunner Scenario
Design a lane-level path planner in MATLAB® and cosimulate with RoadRunner Scenario.