radarDetectionGenerator
Generate radar detections for driving scenario
radarDetectionGenerator is not recommended unless you require C/C++
code generation. Use drivingRadarDataGenerator instead. For more information, see Version History.
Description
The radarDetectionGenerator
System object™ generates detections from a radar sensor mounted on an ego vehicle. All
detections are referenced to the coordinate system of the ego vehicle. You can use the
radarDetectionGenerator object in a scenario containing actors and
trajectories, which you can create by using a drivingScenario object. The object can simulate real detections with added
random noise and also generate false alarm detections. In addition, you can use the
radarDetectionGenerator object to create input to a multiObjectTracker. When building scenarios using the Driving Scenario
Designer app, the radar sensors mounted on the ego vehicle are output as
radarDetectionGenerator objects.
To generate radar detections:
Create the
radarDetectionGeneratorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
sensor = radarDetectionGenerator
sensor = radarDetectionGenerator(Name,Value)radarDetectionGenerator('DetectionCoordinates','Sensor
Cartesian','MaxRange',200) creates a radar detection generator
that reports detections in the sensor Cartesian coordinate system and has a
maximum detection range of 200 meters. Enclose each property name in
quotes.
Properties
Usage
Syntax
Description
[
also returns the number of valid detections reported,
dets,numValidDets]
= sensor(actors,time)numValidDets.
[
also returns a logical value, dets,numValidDets,isValidTime]
= sensor(actors,time)isValidTime, indicating that
the UpdateInterval time has elapsed.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Generate detections using a forward-facing automotive radar mounted on an ego vehicle. Assume that there are three targets:
Vehicle 1 is in the center lane, directly in front of the ego vehicle, and driving at the same speed.
Vehicle 2 is in the left lane and driving faster than the ego vehicle by 12 kilometers per hour.
Vehicle 3 is in the right lane and driving slower than the ego vehicle by 5 kilometers per hour.
All positions, velocities, and measurements are relative to the ego vehicle. Run the simulation for ten steps.
dt = 0.1; pos1 = [150 0 0]; pos2 = [160 10 0]; pos3 = [130 -10 0]; vel1 = [0 0 0]; vel2 = [12*1000/3600 0 0]; vel3 = [-5*1000/3600 0 0]; car1 = struct('ActorID',1,'Position',pos1,'Velocity',vel1); car2 = struct('ActorID',2,'Position',pos2,'Velocity',vel2); car3 = struct('ActorID',3,'Position',pos3,'Velocity',vel3);
Create an automotive radar sensor that is offset from the ego vehicle. By default, the sensor location is at (3.4,0) meters from the vehicle center and 0.2 meters above the ground plane. Turn off the range rate computation so that the radar sensor measures position only.
radar = radarDetectionGenerator('DetectionCoordinates','Sensor Cartesian', ... 'MaxRange',200,'RangeResolution',10,'AzimuthResolution',10, ... 'FieldOfView',[40 15],'UpdateInterval',dt,'HasRangeRate',false); tracker = multiObjectTracker('FilterInitializationFcn',@initcvkf, ... 'ConfirmationThreshold',[3 4],'DeletionThreshold',[6 6]);
Generate detections with the radar from the non-ego vehicles. The output
detections form a cell array and can be passed directly in to the
multiObjectTracker.
simTime = 0;
nsteps = 10;
for k = 1:nsteps
dets = radar([car1 car2 car3],simTime);
[confirmedTracks,tentativeTracks,allTracks] = updateTracks(tracker,dets,simTime);Move the cars one time step and update the multi-object tracker.
simTime = simTime + dt;
car1.Position = car1.Position + dt*car1.Velocity;
car2.Position = car2.Position + dt*car2.Velocity;
car3.Position = car3.Position + dt*car3.Velocity;
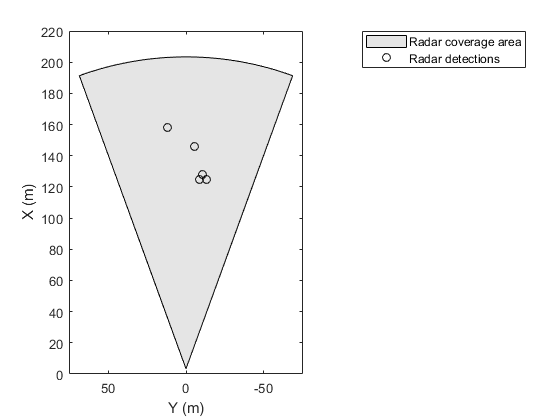
endUse birdsEyePlot to create an overhead view of the
detections. Plot the sensor coverage area. Extract the X
and Y positions of the targets by converting the
Measurement fields of the cell array into a
MATLAB® array. Display the detections on the bird's-eye plot.
BEplot = birdsEyePlot('XLim',[0 220],'YLim',[-75 75]); caPlotter = coverageAreaPlotter(BEplot,'DisplayName','Radar coverage area'); plotCoverageArea(caPlotter,radar.SensorLocation,radar.MaxRange, ... radar.Yaw,radar.FieldOfView(1)) detPlotter = detectionPlotter(BEplot,'DisplayName','Radar detections'); detPos = cellfun(@(d)d.Measurement(1:2),dets,'UniformOutput',false); detPos = cell2mat(detPos')'; if ~isempty(detPos) plotDetection(detPlotter,detPos) end
Extended Capabilities
Version History
Introduced in R2017aThe radarDetectionGenerator
System object and Radar Detection Generator block are not recommended
unless you require C/C++ code generation. Instead, use the drivingRadarDataGenerator
System object and Driving
Radar Data Generator, respectively. These new radar sensors provide
additional properties for modeling radar sensors, including the ability to generate
tracks and clustered detections.
There are no current plans to remove the radarDetectionGenerator System object or Radar Detection Generator block. MATLAB code and Simulink® models that use these features will continue to run. You can still import radarDetectionGenerator objects into the Driving Scenario Designer app. However, the app updates the parameters of the imported sensor to reflect the parameters of a drivingRadarDataGenerator object. In addition, when you export a scenario containing a radarDetectionGenerator sensor to MATLAB code or to a Simulink model, the app exports the sensor as a drivingRadarDataGenerator object or Driving Radar Data Generator block, respectively.
In MATLAB code, replace all instances of radarDetectionGenerator with drivingRadarDataGenerator. In addition, update all radarDetectionGenerator properties with their equivalent drivingRadarDataGenerator properties, as shown in the table. The properties not listed in the table are either specific only to drivingRadarDataGenerator or identical in both objects.
radarDetectionGenerator Properties | Equivalent drivingRadarDataGenerator Properties |
|---|---|
|
|
|
|
|
|
| RangeLimits |
|
|
|
|
|
|
This table shows sample code for creating a drivingRadarDataGenerator object instead of a radarDetectionGenerator object.
| Discouraged Usage | Recommended Replacement |
|---|---|
radar = radarDetectionGenerator( ... 'SensorLocation',[-1 0], ... 'Height',0.2, ... 'Yaw',180, ... 'Pitch',0, ... 'Roll',0, ... 'MaxRange',50); | radar = drivingRadarDataGenerator( ... 'MountingLocation',[-1 0 0.2], ... 'MountingAngles',[180 0 0], ... 'RangeLimits',[0 50]); |
To generate detections from target poses at each simulation time step, replace the dets = radarDetectionGenerator(targets,time) syntax with dets = drivingRadarDataGenerator(targets,time).
In Simulink models, replace all Radar Detection Generator blocks with Driving Radar Data Generator blocks. In the Driving Radar Data Generator blocks, update the parameter values in the same way you would update the drivingRadarDataGenerator property values described in the Update Code section.
If your model contains a separate block that clusters detections, you can remove it because the Driving Radar Data Generator block clusters detections by default.
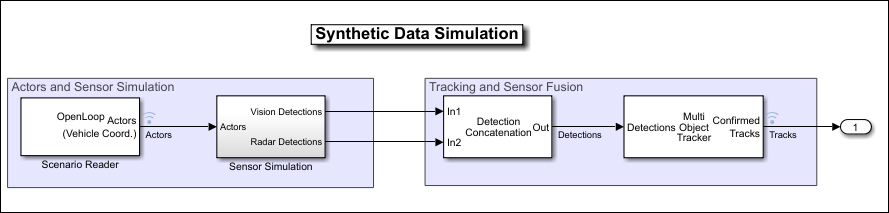
For example, in this model, the Sensor Simulation subsystem outputs concatenated detections from Radar Detection Generator blocks into a separate block that clusters the detections.

In this model, the Sensor Simulation subsystem outputs concatenated, clustered detections from Driving Radar Data Generator blocks directly into the next part of the model pipeline.