readPointCloud
Read point cloud data from LAS or LAZ file
Syntax
Description
[
additionally returns a ptCloud,ptAttributes] = readPointCloud(lasReader)lidarPointAttributes object, ptAttributes, which contains
all available point attributes in the input LAS or LAZ file. (since R2025a)
[___] = readPointCloud(___,
specifies options using one or more name-value pair arguments in addition to any of the
argument combinations in previous syntaxes. For example,
Name=Value)"ROI",[5 10 5 10 5 10] sets the region of interest
(ROI) in which the function reads the point cloud.
Examples
Create a lasFileReader object to use to read point cloud data and header information from a LAZ file.
filepath = fullfile(toolboxdir("lidar"),"lidardata", ... "las","aerialLidarData.laz"); lasReader = lasFileReader(filepath);
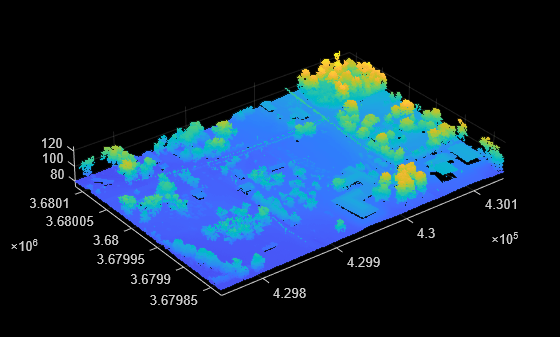
Read point cloud data from the LAZ file using the readPointCloud function.
ptCloud = readPointCloud(lasReader);
Visualize the point cloud.
figure pcshow(ptCloud.Location)
Create a lasFileReader object to use to read point cloud data and header information from a LAZ file.
path = fullfile(toolboxdir("lidar"),"lidardata", ... "las","aerialLidarData.laz"); lasReader = lasFileReader(path);
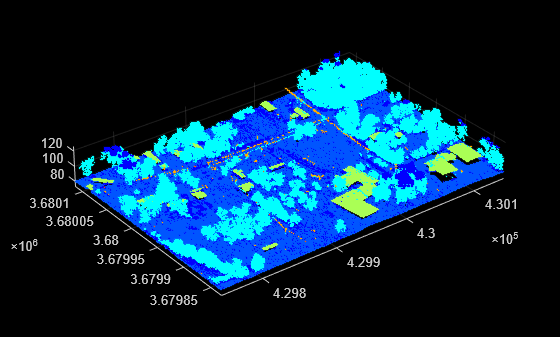
Read point cloud data and classification attributes from the LAZ file using the readPointCloud function.
[ptCloud,pointAttributes] = readPointCloud(lasReader,Attributes="Classification");Convert classification labels to RGB colors, and reshape them to match the point cloud structure.
labels = label2rgb(pointAttributes.Classification); colorData = reshape(labels,[],3);
Visualize the point cloud using the color information.
figure pcshow(ptCloud.Location,colorData)