los2
Line-of-sight visibility between two points on or above terrain
Syntax
Description
Specify Coordinates and Heights
Specify Reference Sphere
Query Intermediate Points
[
determines line-of-sight visibility for intermediate points between the first and second
points, using any combination of input arguments from the previous syntaxes. For each
intermediate point, the function returns the visibility in
vis,visprofile,dist,h,lattrk,lontrk] = los2(___)visprofile, the distance from the first point in
dist, the height in h, the latitude in
lattrk, and the longitude in lontrk. The
number of intermediate points depends on the resolution of the terrain data.
Display and Interactively Select Coordinates
los2(___) displays the visibility profile between the
two points in a new figure on Cartesian axes. The figure illustrates the terrain, the
observer, the line of sight, the visible points, and the obstructed points.
[___] = los2 enables you to interactively select two
points on the current axesm-based map and then determines whether the
points have line-of-sight visibility, returning any combination of output arguments from
previous syntaxes. If the current object on the map is a surface, then the function uses
the z-coordinate data (the ZData property) as the
terrain elevation data. Otherwise, the function uses z-coordinate data
from the first surface it finds on the map. If the surface does not have
z-coordinate data, then the function uses the color data (the
CData property), instead.
Examples
Determine whether two points have line-of-sight visibility. Then, display the visibility profile.
Read terrain data for an area around South Boulder Peak into the workspace as an array and a reference object. Prepare the data for analysis by specifying the output type as "double".
[Z,R] = readgeoraster("n39_w106_3arc_v2.dt1",OutputType="double");
Specify the coordinates of South Boulder Peak and a nearby point.
lat1 = 39.95384; lon1 = -105.29916; lat2 = 39.96955; lon2 = -105.29867;
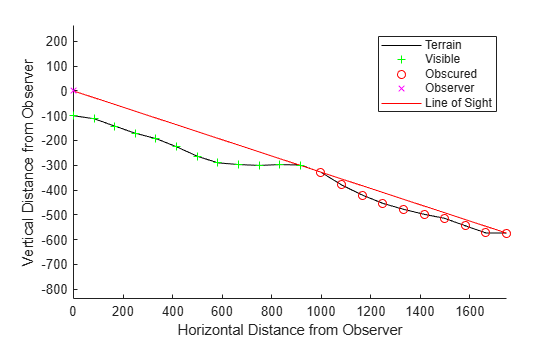
Determine whether the nearby point is visible from a location 100 meters above the peak. The result indicates that the points do not have line-of-sight visibility.
h1 = 100; vis = los2(Z,R,lat1,lon1,lat2,lon2,h1)
vis = logical
0
Display the visibility profile by omitting the output argument.
los2(Z,R,lat1,lon1,lat2,lon2,h1)
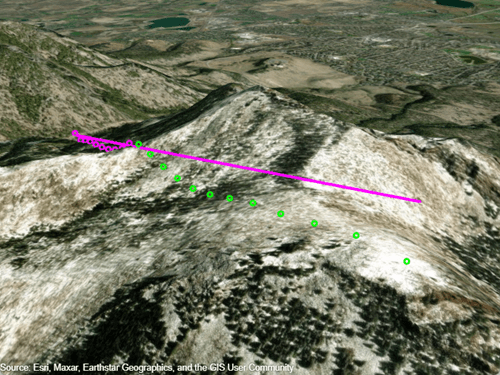
To view a visibility profile in 3-D, calculate the profile using the los2 function and display the profile using the geoglobe and geoplot3 functions.
Read terrain data for an area around South Boulder Peak into the workspace as an array and a reference object. Prepare the data for analysis by specifying the output type as "double".
[Z,R] = readgeoraster("n39_w106_3arc_v2.dt1",OutputType="double");
Specify the coordinates of South Boulder Peak and a nearby point.
lat1 = 39.95384; lon1 = -105.29916; lat2 = 39.96955; lon2 = -105.29867;
Determine whether the nearby point is visible from a location 100 meters above the peak. The result indicates that the points do not have line-of-sight visibility.
h1 = 100; vis = los2(Z,R,lat1,lon1,lat2,lon2,h1)
vis = logical
0
Calculate visibility information for the intermediate points. The outputs lattrk and lontrk contain the latitude and longitude coordinates of the intermediate points. The output visprofile indicates whether the intermediate points are visible from South Boulder Peak.
[~,visprofile,~,~,lattrk,lontrk] = los2(Z,R,lat1,lon1,lat2,lon2,100);
Create a geographic globe that uses custom terrain for the area around South Boulder Peak.
addCustomTerrain("southboulder","n39_w106_3arc_v2.dt1") uif = uifigure; g = geoglobe(uif,Terrain="southboulder");
Plot the line of sight from South Boulder Peak to the nearby point. Use a magenta line to indicate the point is not visible from above the peak.
geoplot3(g,[lat1 lat2],[lon1 lon2],[h1 0],"m",LineWidth=2, ... HeightReference="terrain")
Plot the intermediate points. Use magenta markers for points that are not visible and green markers for points that are visible. Plot each value 10 meters above the terrain so the markers are not obscured by the terrain.
hold(g,"on") geoplot3(g,lattrk(~visprofile),lontrk(~visprofile),10, ... "mo",MarkerSize=2,LineWidth=2,HeightReference="terrain") geoplot3(g,lattrk(visprofile),lontrk(visprofile),10,"go", ... MarkerSize=2,LineWidth=2,HeightReference="terrain")
Adjust the view by setting the camera position, pitch, roll, and heading.
campos(g,39.9519,-105.3039,2.9424e+03) campitch(g,-31.7850) camroll(g,0.3603) camheading(g,36.5618)
Close the figure containing the geographic globe and remove the custom terrain.
close(uif)
removeCustomTerrain("southboulder")