interpolate
Interpolate poses along path segment
Syntax
Description
[
also returns the direction of motion along the path for each section as a vector of 1s
(forward) and –1s (reverse) using the previous inputs.poses,directions] = interpolate(___)
Examples
Create a dubinsConnection object.
dubConnObj = dubinsConnection;
Define start and goal poses as [x y theta] vectors.
startPose = [0 0 0]; goalPose = [1 1 pi];
Calculate a valid path segment to connect the poses.
[pathSegObj,pathCosts] = connect(dubConnObj,startPose,goalPose);
Show the generated path.
show(pathSegObj{1})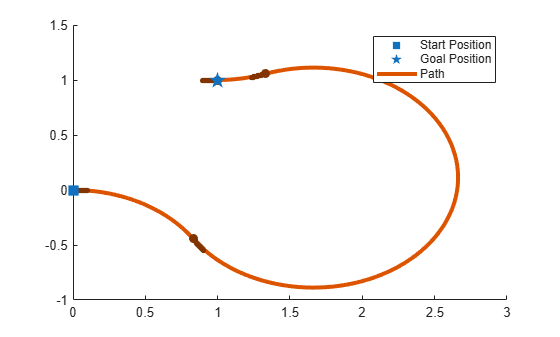
Interpolate poses along the path. Get a pose every 0.2 meters, including the transitions between turns.
length = pathSegObj{1}.Length;
poses = interpolate(pathSegObj{1},0:0.2:length)poses = 32×3
0 0 0
0.1987 -0.0199 6.0832
0.3894 -0.0789 5.8832
0.5646 -0.1747 5.6832
0.7174 -0.3033 5.4832
0.8309 -0.4436 5.3024
0.8418 -0.4595 5.3216
0.9718 -0.6110 5.5216
1.1293 -0.7337 5.7216
1.3081 -0.8226 5.9216
1.5010 -0.8743 6.1216
1.7003 -0.8866 0.0384
1.8980 -0.8590 0.2384
2.0864 -0.7927 0.4384
2.2578 -0.6904 0.6384
⋮
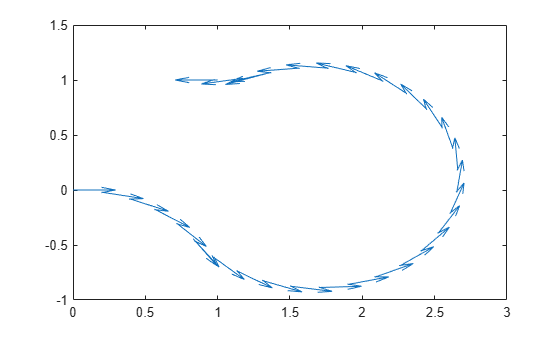
Use the quiver function to plot these poses.
quiver(poses(:,1),poses(:,2),cos(poses(:,3)),sin(poses(:,3)),0.5)
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2019b