optimize
Syntax
Description
The optimize function optimizes a factor graph to find a
solution that minimizes the cost of the nonlinear least squares problem formulated by the
factor graph. The factor graph optimization utilizes the Ceres Solver for node state
covariance estimation, a process that incurs higher computation costs and longer estimation
times as the number of nodes increases. For more information about Ceres-Solver covariance
estimation, see http://ceres-solver.org/nnls_covariance.html.
To estimate node state covariance, optimize with custom solver options using the factorGraphSolverOptions object that has the
StateCovarianceType property set to one or more node types. When
optimizing factor graphs that require estimating state covariance for a high number of nodes,
consider using sliding window optimization to increase optimization speed by estimating the
state covariance for less nodes at once. For more information about sliding window
optimization, see Incrementally Optimize Factor Graph Using Sliding Window.
solnInfo = optimize(fg,poseNodeIDs)
Note
At least one of the specified pose nodes must meet one or both of these requirements:
Have a fixed pose state using the
fixNodefunction.Relate to one or more factors that provide absolute state information:
solnInfo = optimize(___,solverOptions)optimize(fg,factorGraphSolverOptions(StateCovarianceType="POSE_SE2"))
specifies that optimize should estimate and store the node state
covariance for SE(2) pose nodes in the factor graph during optimization.
Examples
Create a matrix of positions of the landmarks to use for localization, and the real poses of the robot to compare your factor graph estimate against. Use the exampleHelperPlotGroundTruth helper function to visualize the landmark points and the real path of the robot.
gndtruth = [0 0 0;
2 0 pi/2;
2 2 pi;
0 2 pi];
landmarks = [3 0; 0 3];
exampleHelperPlotGroundTruth(gndtruth,landmarks)
Use the exampleHelperSimpleFourPoseGraph helper function to create a factor graph contains four poses related by three 2-D two-pose factors. For more details, see the factorTwoPoseSE2 object page.
fg = exampleHelperSimpleFourPoseGraph(gndtruth);
Create Landmark Factors
Generate node IDs to create two node IDs for two landmarks. The second and third pose nodes observe the first landmark point so they should connect to that landmark with a factor. The third and fourth pose nodes observe the second landmark.
lmIDs = generateNodeID(fg,2); lmFIDs = [1 lmIDs(1); % Pose Node 1 <-> Landmark 1 2 lmIDs(1); % Pose Node 2 <-> Landmark 1 2 lmIDs(2); % Pose Node 2 <-> Landmark 2 3 lmIDs(2)]; % Pose Node 3 <-> Landmark 2
Define the relative position measurements between the position of the poses and their landmarks in the reference frame of the pose node. Then add some noise.
lmFMeasure = [0 -1; % Landmark 1 in pose node 1 reference frame -1 2; % Landmark 1 in pose node 2 reference frame 2 -1; % Landmark 2 in pose node 2 reference frame 0 -1]; % Landmark 2 in pose node 3 reference frame lmFMeasure = lmFMeasure + 0.1*rand(4,2);
Create the landmark factors with those relative measurements and add it to the factor graph.
lmFactor = factorPoseSE2AndPointXY(lmFIDs,Measurement=lmFMeasure); addFactor(fg,lmFactor);
Set the initial state of the landmark nodes to the real position of the landmarks with some noise.
nodeState(fg,lmIDs,landmarks+0.1*rand(2));
Optimize Factor Graph
Optimize the factor graph with the default solver options. The optimization updates the states of all nodes in the factor graph, so the positions of vehicle and the landmarks update.
rng default
optimize(fg)ans = struct with fields:
InitialCost: 0.0538
FinalCost: 6.2053e-04
NumSuccessfulSteps: 4
NumUnsuccessfulSteps: 0
TotalTime: 1.5092e-04
TerminationType: 0
IsSolutionUsable: 1
OptimizedNodeIDs: [1 2 3 4 5]
FixedNodeIDs: 0
Visualize and Compare Results
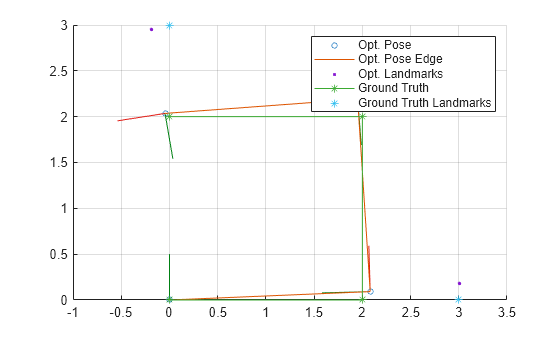
Get and store the updated node states for the robot and landmarks. Then plot the results, comparing the factor graph estimate of the robot path to the known ground truth of the robot.
poseIDs = nodeIDs(fg,NodeType="POSE_SE2")poseIDs = 1×4
0 1 2 3
poseStatesOpt = nodeState(fg,poseIDs)
poseStatesOpt = 4×3
0 0 0
2.0815 0.0913 1.5986
1.9509 2.1910 -3.0651
-0.0457 2.0354 -2.9792
landmarkStatesOpt = nodeState(fg,lmIDs)
landmarkStatesOpt = 2×2
3.0031 0.1844
-0.1893 2.9547
handle = show(fg,Orientation="on",OrientationFrameSize=0.5,Legend="on"); grid on; hold on; exampleHelperPlotGroundTruth(gndtruth,landmarks,handle);
While building large factor graphs, it is inefficient to reoptimize an entire factor graph each time you add new factors and nodes to the graph at a new time step. This example shows an alternative optimization approach. Instead of optimizing an entire factor graph at each time step, optimize a subset or window of the most recent pose nodes. Then at the next time step, slide the window to the next set of most recent pose nodes and optimize those pose nodes. This approach minimizes the number of times that you need to reoptimize older parts of the factor graph.
Create a factor graph and load the sensorData MAT file. This MAT file contains sensor data for ten time steps.
fg = factorGraph;
load sensorData.matTo also estimate and store covariance information during the sliding window optimization, create custom solver options that specify to estimate the state covariance for the SE(2) pose nodes.
options = factorGraphSolverOptions(StateCovarianceType="POSE_SE2")options =
factorGraphSolverOptions with properties:
MaxIterations: 200
FunctionTolerance: 1.0000e-06
GradientTolerance: 1.0000e-10
StepTolerance: 1.0000e-08
VerbosityLevel: 0
TrustRegionStrategyType: 1
StateCovarianceType: Pose_SE2
InitialTrustRegionRadius: 10000
Set the window size to five pose nodes. The larger the size of the sliding window, the more accurate the optimization becomes. If the size of the sliding window is small, then there may not be enough measurements for the optimization to produce an accurate solution.
windowSize = 5;
For each time step:
Generate a new node ID for the pose node of the current time step.
Get the current pose data for the current time step.
Generate a node ID for a newly detected landmark point node. Connect the current pose node to two landmarks. Assume that the first landmark that the robot detects at the current time step is the same as the second landmark that the robot detected at the previous time step. For the first time step, both landmarks are new so you must generate two landmark IDs.
Add a two-pose factor that connects the pose node at the current time step with the pose node of the previous time step.
Add landmark factors that create the specified landmark point node IDs to the graph.
Set the initial state of the landmark point nodes and the current pose node as the sensor data for the current time step.
If the graph contains at least five pose nodes, then fix the earliest pose node in the sliding window and then optimize the pose nodes in the sliding window. Because both measurements between the poses, and the measurements between poses and landmarks are relative, you must fix the earliest node or the solution from optimization may be incorrect. Note that when you specify the pose nodes, it includes factors that relate the specified pose nodes to other specified pose nodes, or to any non-pose nodes.
for t = 1:10 % 1. Generate node ID for pose at this time step currPoseID = generateNodeID(fg,1); % 2. Get current pose data at this time step currPose = poseInitStateData{t}; % 3. On the first time step, create pose node and two landmarks if t == 1 lmID = generateNodeID(fg,2); lmFactorIDs = [currPoseID lmID(1); currPoseID lmID(2)]; else % On subsequent time steps, connect to previous landmark and create new landmark lmIDNew = generateNodeID(fg,1); allLandmarkIDs = nodeIDs(fg,NodeType="POINT_XY"); lmIDPrior = allLandmarkIDs(end); lmID = [lmIDPrior lmIDNew]; lmFactorIDs = [currPoseID lmIDPrior; currPoseID lmIDNew]; end % 4. After first time step, connect current pose with previous node if t > 1 allPoseIDs = nodeIDs(fg,NodeType="POSE_SE2"); prevPoseID = allPoseIDs(end); poseFactor = factorTwoPoseSE2([prevPoseID currPoseID],Measurement=poseSensorData{t}); addFactor(fg,poseFactor); end % 5. Create landmark factors with sensor observation data and add to graph lmFactor = factorPoseSE2AndPointXY(lmFactorIDs,Measurement=lmSensorData{t}); addFactor(fg,lmFactor); % 6. Set initial guess for states of the pose node and observed landmarks nodes nodeState(fg,lmID,lmInitStateData{t}); nodeState(fg,currPoseID,currPose); % 7. Optimize nodes in sliding window when there are enough poses if t >= windowSize allPoseIDs = nodeIDs(fg,NodeType="POSE_SE2"); poseIDsInWindow = allPoseIDs(end-(windowSize-1):end); fixNode(fg,poseIDsInWindow(1)); optimize(fg,poseIDsInWindow,options); end end
Get all of the pose IDs and all of the landmark IDs. Use those IDs to get the optimized state of the pose nodes and landmark point nodes, and get the state covariance of the pose nodes.
allPoseIDs = nodeIDs(fg,NodeType="POSE_SE2"); allLandmarkIDs = nodeIDs(fg,NodeType="POINT_XY"); optPoseStates = nodeState(fg,allPoseIDs); optLandmarkStates = nodeState(fg,allLandmarkIDs); poseCov = nodeCovariance(fg,allPoseIDs);
Use the helper function exampleHelperPlotPositionsAndLandmarks to plot both the ground truth of the poses and landmarks.
initPoseStates = cat(1,poseInitStateData{:});
initLandmarkStates = cat(1,lmInitStateData{:});
exampleHelperPlotPositionsAndLandmarks(initPoseStates, ...
initLandmarkStates)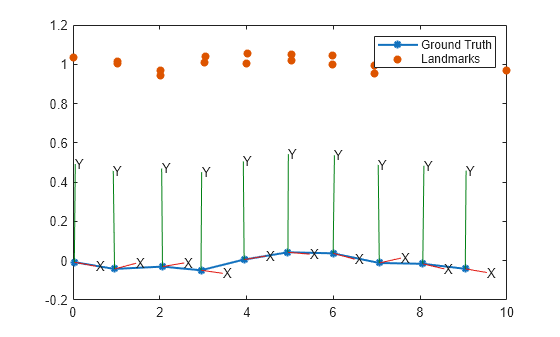
Plot the ground truth of the poses and landmarks along with the optimization solution.
exampleHelperPlotPositionsAndLandmarks(initPoseStates, ... initLandmarkStates, ... optPoseStates, ... optLandmarkStates)
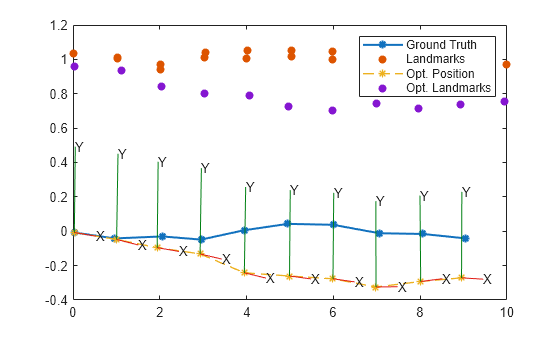
Note that you can improve the accuracy of the optimization by increasing the sliding window size or by using custom factor graph solver options.
Input Arguments
Output Arguments
More About
A factor graph is considered connected if there is a path between every pair of nodes. For example, for a factor graph containing four pose nodes, connected consecutively by three factors, there are paths in the factor graph from one node in the graph to any other node in the graph.
connected = isConnected(fg,[1 2 3 4])
connected =
1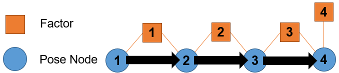
If the graph does not contain node 3, although there is still a path from node 1 to node 2, there is no path from node 1 or node 2 to node 4.
connected = isConnected(fg,[1 2 4])
connected =
0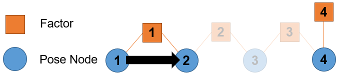
A fully connected factor graph is important for optimization. If the factor graph is not fully
connected, then the optimization occurs separately for each of the disconnected graphs,
which may produce undesired results. The connectivity of graphs can become more complex
when you specify certain subsets of pose node IDs to optimize. This is because the
optimize
function optimizes parts of the factor graph by using the specified IDs to identify which
factors to use to create a partial factor graph. optimize adds a
factor to the partial factor graph if that factor connects to any of the specified pose
nodes and does not connect to any unspecified pose nodes. The function also adds any
non-pose nodes that the added factors connect to, but does not add other factors connected
to those nodes. For example, for this factor graph there are three pose nodes, two
non-pose nodes, and the factors that connect the nodes.
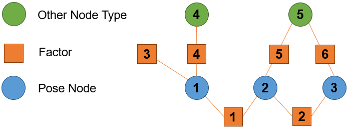
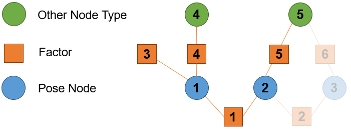
If you specify nodes 1 and 2, then factors 1, 3, 4, and 5 form a factor graph for the optimization because they connect to pose nodes 1 and 2. The optimization includes nodes 4 and 5 because they connect to factors that relate to the specified pose node IDs.
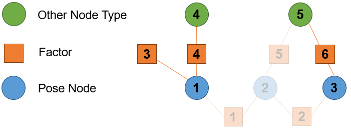
If you specify poseNodeIDs as [1 3], then the
optimize function optimizes each separated graph separately
because the formed factor graph does not contain a path between nodes 1 and 3.
Tips
Before you optimize the factor graph or a subset of nodes, use the
nodeStatefunction to save the node states to the workspace. If, after running the optimization, you want to make adjustments to it, you can set the node states back to the saved states.If your optimization was unsuccessful or resulted in inaccurate node states, consider reevaulating the initial guess states of the nodes and refining them as necessary using the
nodeStatefunction.For debugging a partial optimization of a factor graph, check the
OptimizedNodeIDsandFixedNodeIDsfields of thesolnInfooutput argument to see which of the optimized node IDs and which of fixed nodes contributed to the optimization.To check if
poseNodeIDsforms a connected factor graph, use theisConnectedfunction.