fitCollisionCapsule
Description
[
fits a collision capsule collCapsule,fitInfo] = fitCollisionCapsule(geom)collCapsule around a collision geometry
geom.
Examples
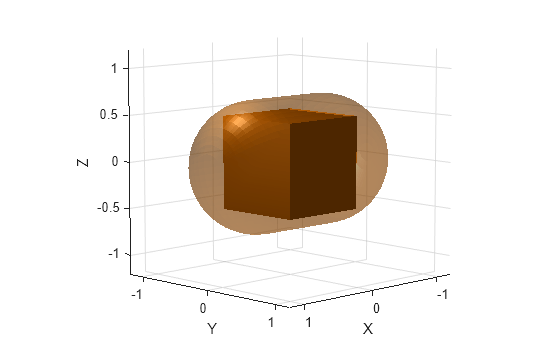
Create a box with a length, width, and height of 1 meter and fit a collision capsule on it.
box = collisionBox(1,1,1);
show(box);
hold on
[collcaps,fitinfo]= fitCollisionCapsule(box);Visualize the new collision capsule on top of the box and set the alphas of the capsule to a low value so that the box is visible.
[~,capvis] = show(collcaps); capvis.FaceAlpha=0.4; xlim auto ylim auto zlim auto
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2022b