addConfiguration
Store current configuration
Description
addConfiguration( adds the current
configuration to the viztree)StoredConfigurations property of the interactiveRigidBodyTree object, viztree.
Examples
Use the interactiveRigidBodyTree object to manually move around a robot in a figure. The object uses interactive markers in the figure to track the desired poses of different rigid bodies in the rigidBodyTree object.
Load Robot Model
Use the loadrobot function to access provided robot models as rigidBodyTree objects.
robot = loadrobot("atlas");Visualize Robot and Save Configurations
Create an interactive tree object and associated figure, specifying the loaded robot model and its left hand as the end effector.
viztree = interactiveRigidBodyTree(robot,"MarkerBodyName","l_hand");
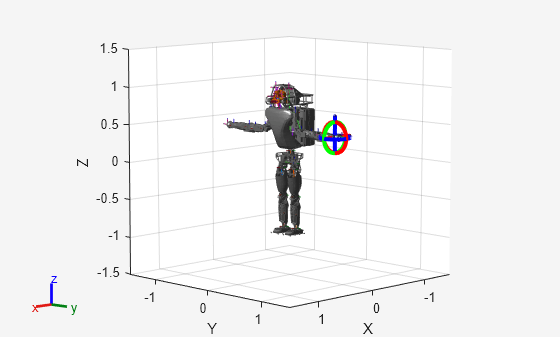
Click and drag the interactive marker to change the robot configuration. You can click and drag any of the axes for linear motion, rotate the body about an axis using the red, green, and blue circles, and drag the center of the interactive marker to position it in 3-D space.
The interactiveRigidBodyTree object uses inverse kinematics to determine a configuration that achieves the desired end-effector pose. If the associated rigid body cannot reach the marker, the figure renders the best configuration from the inverse kinematics solver.
Programmatically set the current configuration. Assign a vector of length equal to the number of nonfixed joints in the RigidBodyTree to the Configuration property.
currConfig = homeConfiguration(viztree.RigidBodyTree);
currConfig(1:10) = [ 0.2201 -0.1319 0.2278 -0.3415 0.4996 ...
0.0747 0.0377 0.0718 -0.8117 -0.0427]';
viztree.Configuration = currConfig;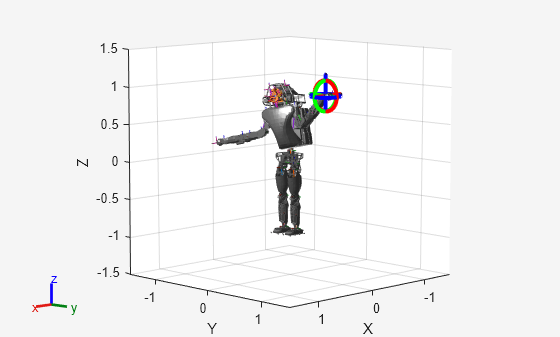
Save the current robot configuration in the StoredConfigurations property.
addConfiguration(viztree)
To switch the end effector to a different rigid body, right-click the desired body in the figure and select Set body as marker body. Use this process to select the right hand frame.
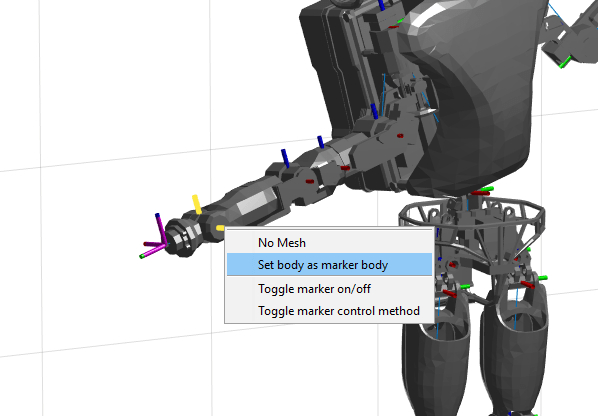
You can also set the MarkerBodyName property to the specific body name.
viztree.MarkerBodyName = "r_hand";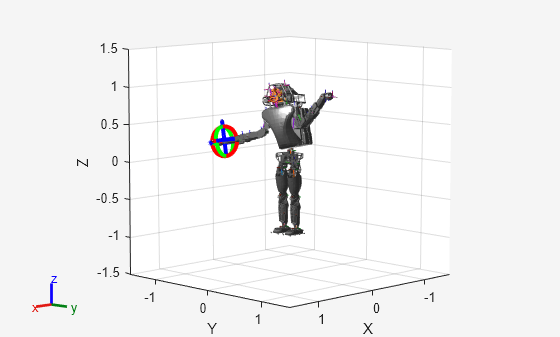
Move the right hand to a new position. Set the configuration programmatically. The marker moves to the new position of the end effector.
currConfig(1:18) = [-0.1350 -0.1498 -0.0167 -0.3415 0.4996 0.0747
0.0377 0.0718 -0.8117 -0.0427 0 0.4349
-0.5738 0.0563 -0.0095 0.0518 0.8762 -0.0895]';
viztree.Configuration = currConfig;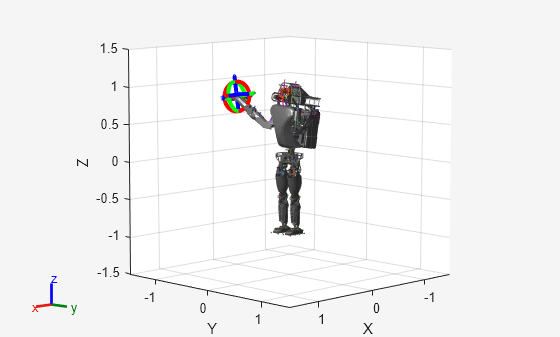
Save the current configuration.
addConfiguration(viztree)
Add Constraints
By default, the robot model respects only the joint limits of the rigidBodyJoint objects associated with the RigidBodyTree property. To add constraints, generate Robot Constraint objects and specify them as a cell array in the Constraints property. To see a list of robotic constraints, see Inverse Kinematics. Specify a pose target for the pelvis to keep it fixed to the home position. Specify a position target for the right foot to be raised in front and above its current position.
fixedWaist = constraintPoseTarget("pelvis"); raiseRightLeg = constraintPositionTarget("r_foot","TargetPosition",[1 0 0.5]);
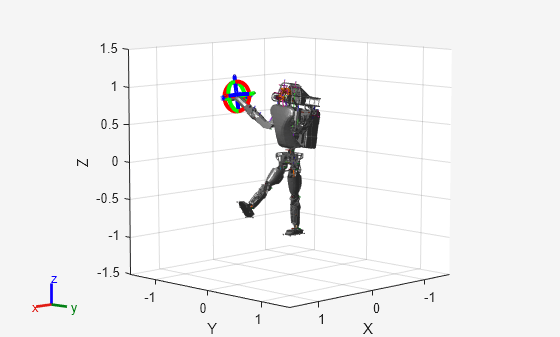
Apply these constraints to the interactive rigid body tree object as a cell array. The right leg in the resulting figure changes position.
viztree.Constraints = {fixedWaist raiseRightLeg}; 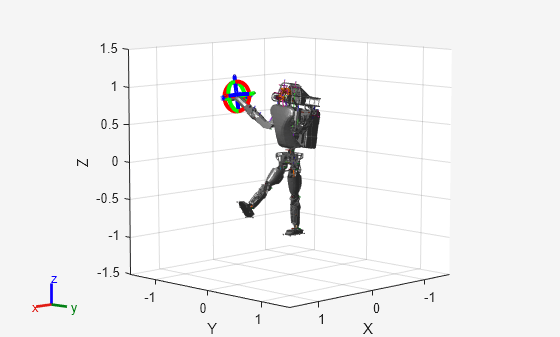
Notice the change in position of the right leg. Save this configuration as well.
addConfiguration(viztree)
Play Back Configurations
To play back configurations, iterate through the stored configurations index and set the current configuration equal to the stored configuration column vector at each iteration. Because configurations are stored as column vectors, use the second dimension of the matrix.
for i = 1:size(viztree.StoredConfigurations,2) viztree.Configuration = viztree.StoredConfigurations(:,i); pause(0.5) end
Input Arguments
Version History
Introduced in R2020a