Trajectory Generation
These functions use different mathematical equations for generating trajectories for manipulator robots. Polynomials, B-splines, and trapezoidal velocity profiles enable you to generate trajectories for multi-degree-of-freedom (DOF) systems. You can also interpolate between rotation matrices and homogeneous transformations.
The examples show different applications of trajectory execution including planning, control, and simulation for shape tracing and pick-and-place workflows.
Functions
Blocks
| Polynomial Trajectory | Generate polynomial trajectories through waypoints |
| Rotation Trajectory | Generate trajectory between two orientations |
| Transform Trajectory | Generate trajectory between two homogeneous transforms |
| Trapezoidal Velocity Profile Trajectory | Generate trajectories through multiple waypoints using trapezoidal velocity profiles |
| Minimum Jerk Polynomial Trajectory | Generate minimum jerk polynomial trajectories through multiple waypoints (Since R2022a) |
| Minimum Snap Polynomial Trajectory | Generate minimum snap polynomial trajectories through multiple waypoints (Since R2022a) |
Topics
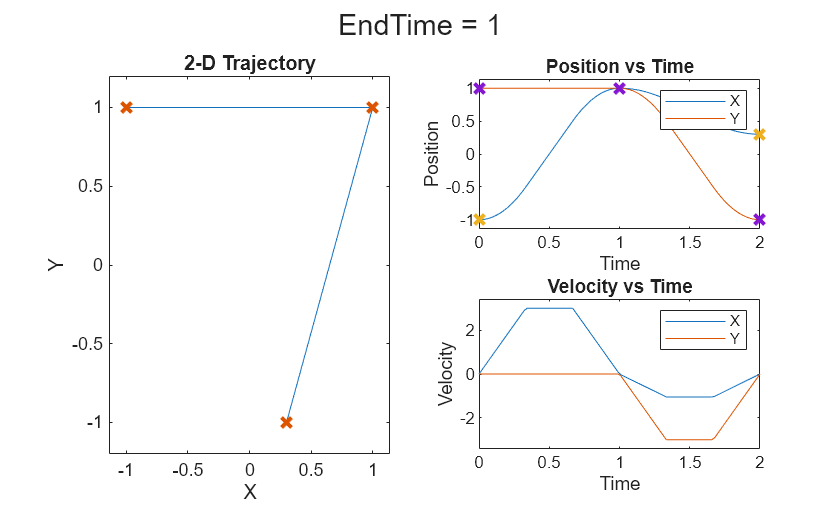
- Choose Trajectories for Manipulator Paths
Explore and compare different manipulator trajectory types by generating paths for these trajectory profiles.
- Generate Time-Optimal Trajectories with Constraints Using TOPP-RA Solver
Generate trajectories within velocity and acceleration limits using TOPP-RA solver for time-optimal path planning.
- Manipulator Shape Tracing in MATLAB and Simulink
Generate a smooth 3-D path for Sawyer robot end-effector by tracing predefined 3-D shapes.
Featured Examples
Perform Safe Trajectory Tracking Control Using Robotics Manipulator Blocks
Achieve safe trajectory tracking control of a simulated robot using manipulator algorithm blocks in Simulink®.
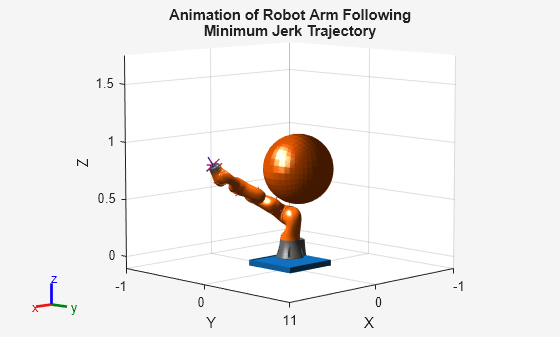
Plan Minimum Jerk Trajectory for Robot Arm
Plan and visualize a minimum jerk trajectory for a robotic arm navigating through obstacles.
Design Trajectory with Velocity Limits Using Trapezoidal Velocity Profile
Use the trapezoidal velocity profile to design a trajectory with input bounds in place of parameters.
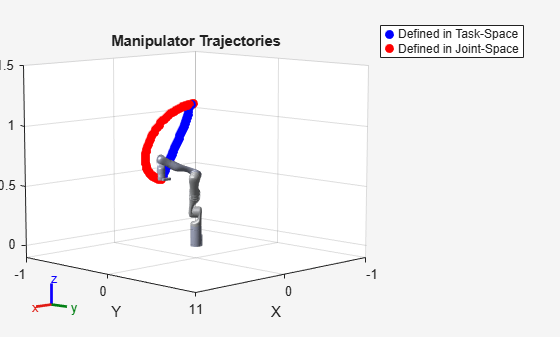
Plan and Execute Task- and Joint-Space Trajectories Using Kinova Gen3 Manipulator
Generate and simulate interpolated joint trajectories to move to a desired end-effector pose using Kinova® Gen3 manipulator.
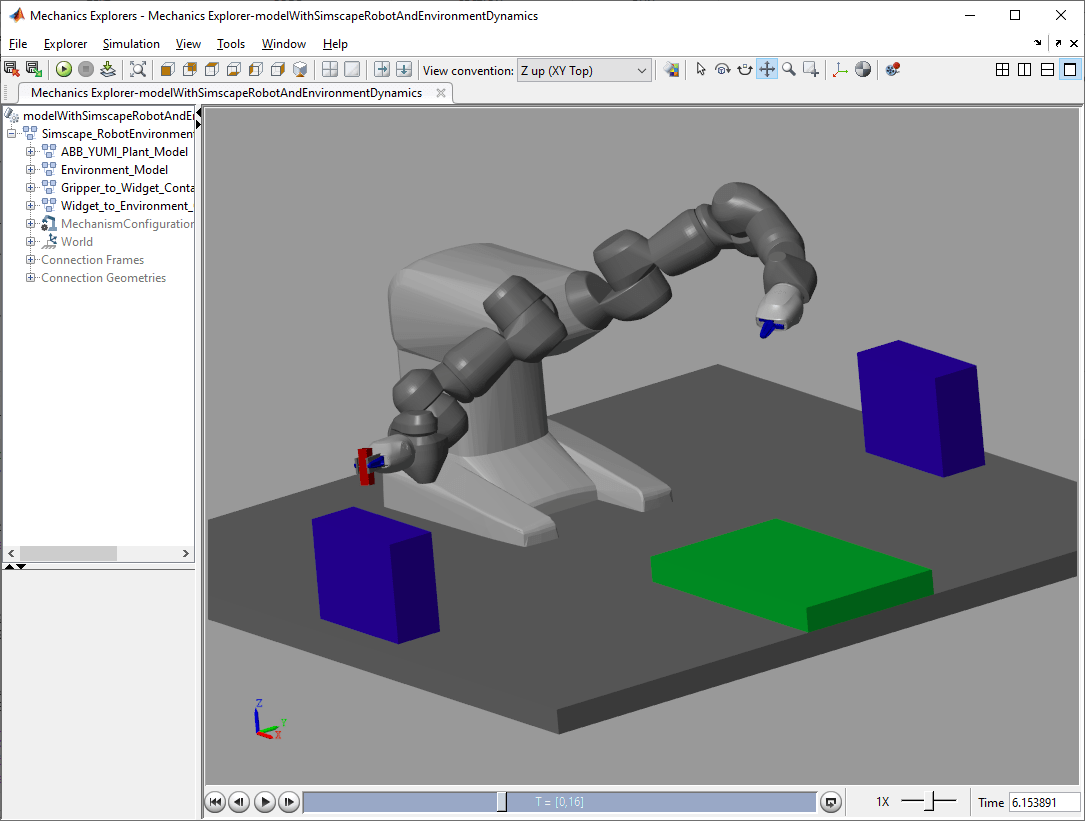
Model and Control a Manipulator Arm with Robotics and Simscape
Design YuMi robot algorithms in Simulink and simulate in Simscape™, emphasizing algorithm precision and system modeling.