cubicpolytraj
Generate third-order polynomial trajectories
Syntax
Description
[
generates a third-order polynomial that achieves a given set of input waypoints with
corresponding time points. The function outputs positions, velocities, and accelerations at
the given time samples, q,qd,qdd,pp] = cubicpolytraj(wayPoints,timePoints,tSamples)tSamples. The function also returns the
piecewise polynomial pp form of the polynomial trajectory with respect
to time.
[
specifies additional parameters as q,qd,qdd,pp] = cubicpolytraj(___,Name,Value)Name,Value pair arguments using any
combination of the previous syntaxes.
Examples
Use the cubicpolytraj function with a given set of 2-D xy waypoints. Time points for the waypoints are also given.
wpts = [1 4 4 3 -2 0; 0 1 2 4 3 1]; tpts = 0:5;
Specify a time vector for sampling the trajectory. Sample at a smaller interval than the specified time points.
tvec = 0:0.01:5;
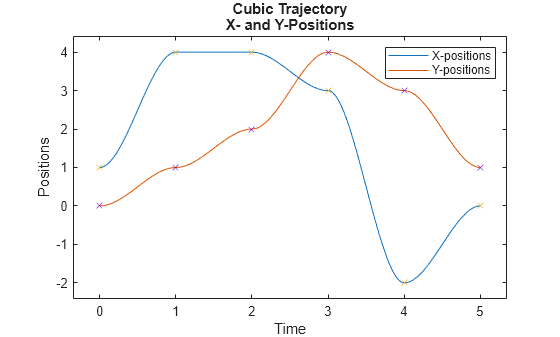
Compute the cubic trajectory. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), and polynomial coefficients (pp) of the cubic polynomial.
[q,qd,qdd,pp] = cubicpolytraj(wpts,tpts,tvec);
Plot the cubic trajectories for the x- and y-positions. Compare the trajectory with each waypoint.
plot(tvec,q) hold on plot(tpts,wpts,"x") xlabel("Time") ylabel("Positions") legend("X-positions","Y-positions")'
ans =
Legend (X-positions, Y-positions) with properties:
String: {'X-positions' 'Y-positions'}
Location: 'northeast'
Orientation: 'vertical'
FontSize: 9
Position: [0.6891 0.8011 0.1975 0.0931]
Units: 'normalized'
Show all properties
title(["Cubic Trajectory","X- and Y-Positions"]) axis padded hold off
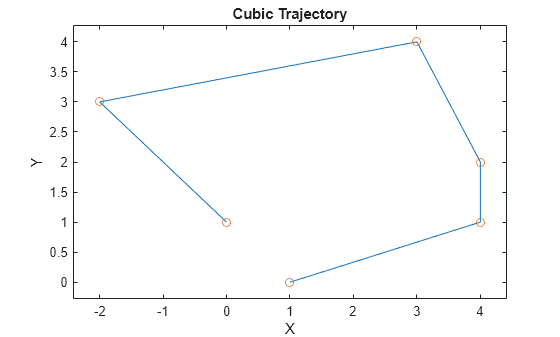
You can also verify the actual positions in the 2-D plane. Plot the separate rows of the q vector and the waypoints as x- and *y -*positions.
figure plot(q(1,:),q(2,:)) hold on scatter(wpts(1,:),wpts(2,:)) xlabel("X") ylabel("Y") title("Cubic Trajectory") axis padded
Input Arguments
Name-Value Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2019a
See Also
bsplinepolytraj | contopptraj | quinticpolytraj | rottraj | transformtraj | trapveltraj