Fixed-Structure H-infinity Synthesis with hinfstruct
This example uses the hinfstruct command to tune a fixed-structure controller subject to constraints.
Introduction
The hinfstruct command extends classical synthesis (see hinfsyn) to fixed-structure control systems. This command is meant for users already comfortable with the hinfsyn workflow. If you are unfamiliar with synthesis or find augmented plants and weighting functions intimidating, use systune and looptune instead. See Tune Control Systems Using systune for the systune counterpart of this example.
Plant Model
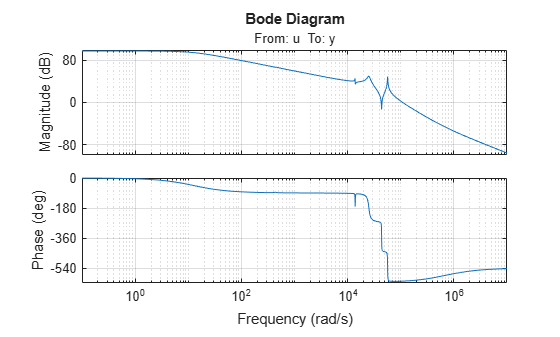
This example uses a 9th-order model of the head-disk assembly (HDA) in a hard-disk drive. This model captures the first few flexible modes in the HDA.
load hinfstruct_demo G bode(G), grid
We use the feedback loop shown below to position the head on the correct track. This control structure consists of a PI controller and a low-pass filter in the return path. The head position y should track a step change r with a response time of about one millisecond, little or no overshoot, and no steady-state error.
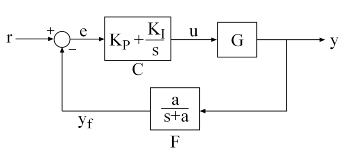
Figure 1: Control Structure
Tunable Elements
There are two tunable elements in the control structure of Figure 1: the PI controller and the low-pass filter
Use the tunablePID class to parameterize the PI block and specify the filter as a transfer function depending on a tunable real parameter .
C0 = tunablePID('C','pi'); % tunable PI a = realp('a',1); % filter coefficient F0 = tf(a,[1 a]); % filter parameterized by a
Loop Shaping Design
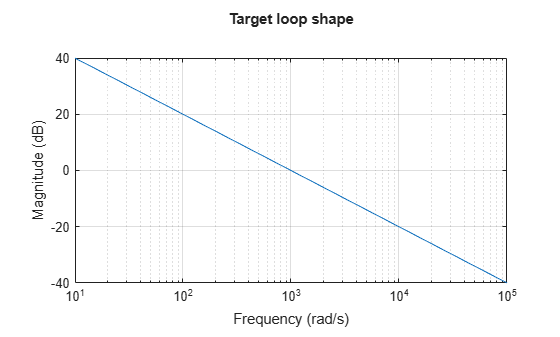
Loop shaping is a frequency-domain technique for enforcing requirements on response speed, control bandwidth, roll-off, and steady state error. The idea is to specify a target gain profile or "loop shape" for the open-loop response . A reasonable loop shape for this application should have integral action and a crossover frequency of about 1000 rad/s (the reciprocal of the desired response time of 0.001 seconds). This suggests the following loop shape:
wc = 1000; % target crossover s = tf('s'); LS = (1+0.001*s/wc)/(0.001+s/wc); bodemag(LS,{1e1,1e5}), grid, title('Target loop shape')
Note that we chose a bi-proper, bi-stable realization to avoid technical difficulties with marginally stable poles and improper inverses. In order to tune and with hinfstruct, we must turn this target loop shape into constraints on the closed-loop gains. A systematic way to go about this is to instrument the feedback loop as follows:
Add a measurement noise signal
nUse the target loop shape
LSand its reciprocal to filter the error signaleand the white noise sourcenw.
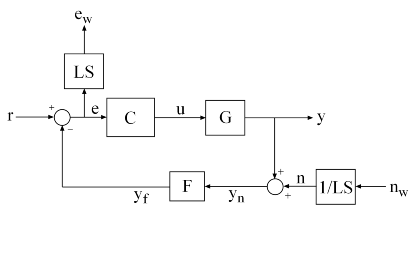
Figure 2: Closed-Loop Formulation
If denotes the closed-loop transfer function from (r,nw) to (y,ew), the gain constraint
secures the following desirable properties:
At low frequency (w<wc), the open-loop gain stays above the gain specified by the target loop shape
LSAt high frequency (w>wc), the open-loop gain stays below the gain specified by
LSThe closed-loop system has adequate stability margins
The closed-loop step response has small overshoot.
We can therefore focus on tuning and to enforce .
Specifying the Control Structure in MATLAB
In MATLAB®, you can use the connect command to model by connecting the fixed and tunable components according to the block diagram of Figure 2:
% Label the block I/Os Wn = 1/LS; Wn.u = 'nw'; Wn.y = 'n'; We = LS; We.u = 'e'; We.y = 'ew'; C0.u = 'e'; C0.y = 'u'; F0.u = 'yn'; F0.y = 'yf'; % Specify summing junctions Sum1 = sumblk('e = r - yf'); Sum2 = sumblk('yn = y + n'); % Connect the blocks together T0 = connect(G,Wn,We,C0,F0,Sum1,Sum2,{'r','nw'},{'y','ew'});
These commands construct a generalized state-space model T0 of . This model depends on the tunable blocks C and a:
T0.Blocks
ans = struct with fields:
C: [1×1 tunablePID]
a: [1×1 realp]
Note that T0 captures the following "Standard Form" of the block diagram of Figure 2 where the tunable components are separated from the fixed dynamics.
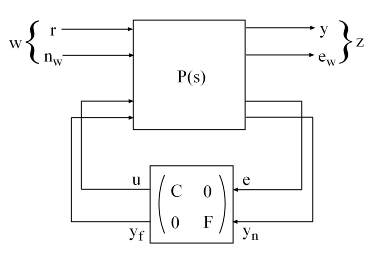
Figure 3: Standard Form for Disk-Drive Loop Shaping
Tuning the Controller Gains
We are now ready to use hinfstruct to tune the PI controller and filter for the control architecture of Figure 1. To mitigate the risk of local minima, run three optimizations, two of which are started from randomized initial values for C0 and F0.
rng('default') opt = hinfstructOptions('Display','final','RandomStart',5); T = hinfstruct(T0,opt);
Final: Peak gain = 3.88, Iterations = 67
Final: Peak gain = 596, Iterations = 174
Some closed-loop poles are marginally stable (decay rate near 1e-07)
Final: Peak gain = 596, Iterations = 157
Some closed-loop poles are marginally stable (decay rate near 1e-07)
Final: Peak gain = 3.88, Iterations = 65
Final: Peak gain = 1.56, Iterations = 101
Final: Peak gain = 1.56, Iterations = 92
The best closed-loop gain is 1.56, so the constraint is nearly satisfied. The hinfstruct command returns the tuned closed-loop transfer . Use showTunable to see the tuned values of and the filter coefficient :
showTunable(T)
C =
1
Kp + Ki * ---
s
with Kp = 0.000846, Ki = 0.0103
Name: C
Continuous-time PI controller in parallel form.
-----------------------------------
a = 5.49e+03
Use getBlockValue to get the tuned value of and use getValue to evaluate the filter for the tuned value of :
C = getBlockValue(T,'C'); F = getValue(F0,T.Blocks); % propagate tuned parameters from T to F tf(F)
ans =
From input "yn" to output "yf":
5486
--------
s + 5486
Continuous-time transfer function.
Model Properties
To validate the design, plot the open-loop response L=F*G*C and compare with the target loop shape LS:
bode(LS,'r--',G*C*F,'b',{1e1,1e6}), grid, title('Open-loop response'), legend('Target','Actual')
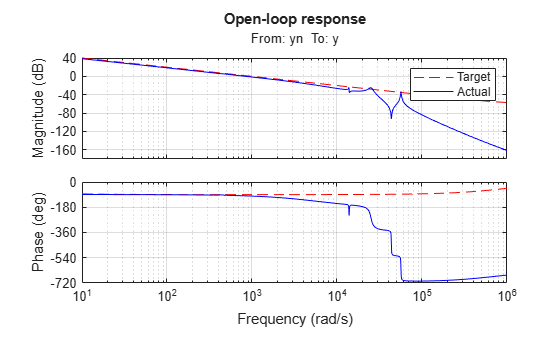
The 0dB crossover frequency and overall loop shape are as expected. The stability margins can be read off the plot by right-clicking and selecting the Characteristics menu. This design has 24dB gain margin and 81 degrees phase margin. Plot the closed-loop step response from reference r to position y:
step(feedback(G*C,F)), grid, title('Closed-loop response')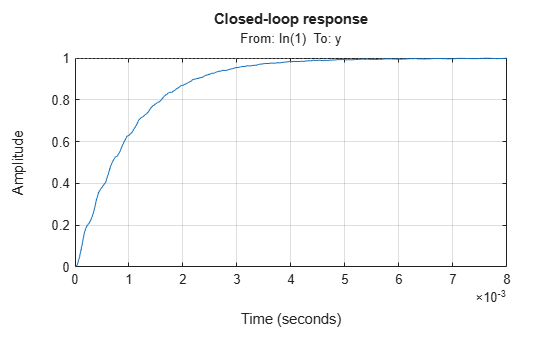
While the response has no overshoot, there is some residual wobble due to the first resonant peaks in G. You might consider adding a notch filter in the forward path to remove the influence of these modes.
Tuning the Controller Gains from Simulink
Suppose you used this Simulink model to represent the control structure. If you have Simulink® Control Design™ installed, you can tune the controller gains from this Simulink model as follows. First mark the signals r,e,y,n as Linear Analysis points in the Simulink model.
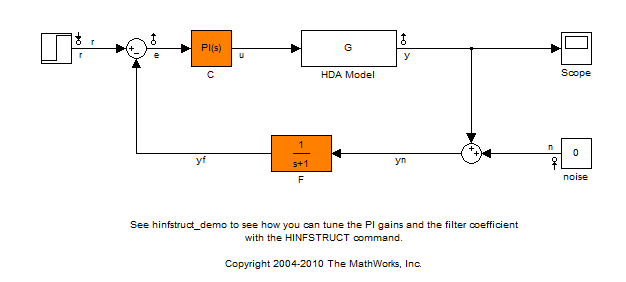
Then create an instance of the slTuner interface and mark the Simulink blocks C and F as tunable:
ST0 = slTuner('rct_diskdrive',{'C','F'});
Since the filter has a special structure, explicitly specify how to parameterize the F block:
a = realp('a',1); % filter coefficient setBlockParam(ST0,'F',tf(a,[1 a]));
Finally, use getIOTransfer to derive a tunable model of the closed-loop transfer function (see Figure 2)
% Compute tunable model of closed-loop transfer (r,n) -> (y,e) T0 = getIOTransfer(ST0,{'r','n'},{'y','e'}); % Add weighting functions in n and e channels T0 = blkdiag(1,LS) * T0 * blkdiag(1,1/LS);
You are now ready to tune the controller gains with hinfstruct:
rng(0) opt = hinfstructOptions('Display','final','RandomStart',5); T = hinfstruct(T0,opt);
Final: Peak gain = 3.88, Iterations = 67
Final: Peak gain = 597, Iterations = 182
Some closed-loop poles are marginally stable (decay rate near 1e-07)
Final: Peak gain = 597, Iterations = 184
Some closed-loop poles are marginally stable (decay rate near 1e-07)
Final: Peak gain = 1.56, Iterations = 104
Final: Peak gain = 1.56, Iterations = 102
Final: Peak gain = 1.56, Iterations = 100
Verify that you obtain the same tuned values as with the MATLAB approach:
showTunable(T)
C =
1
Kp + Ki * ---
s
with Kp = 0.000846, Ki = 0.0103
Name: C
Continuous-time PI controller in parallel form.
-----------------------------------
a = 5.49e+03