Engage and Disengage Gears Using a Clutch
This example shows a gear being engaged, then disengaged, by a custom clutch. Torque and motion are transferred from one shaft to another over a finite time interval.
A common task in drivetrain design is transferring motion and torque at different fixed gear ratios. Drivetrains are typically designed to switch among a set of distinct gear ratios. Implementing the switch from one gear ratio to another requires gradually disengaging one set of driveline couplings and engaging another set. Clutches allow you to engage and disengage driveline shafts from one another gradually. The Disc Friction Clutch block represents a standard surface friction-based clutch that models this behavior.
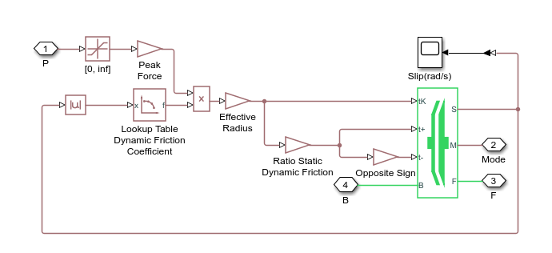
The model in this example uses a custom clutch subsystem that contains a Fundamental Friction Clutch block. The Fundamental Friction Clutch block requires you to specify the static and kinetic clutch friction more completely than the Disk Friction Clutch block requires because it models clutches in greater detail. See also Model Friction Clutches at a Fundamental Level.
Note
You can model continuous motion-torque transfer with the Torque Converter block, which simulates fluid viscosity instead of surface friction and does not lock.
Simulate Gear Engagement and Disengagement
Open the model. At the MATLAB® command prompt, enter
openExample('sdl/CustomClutchExample')Custom Clutch Model with Programmed Clutch Pressure
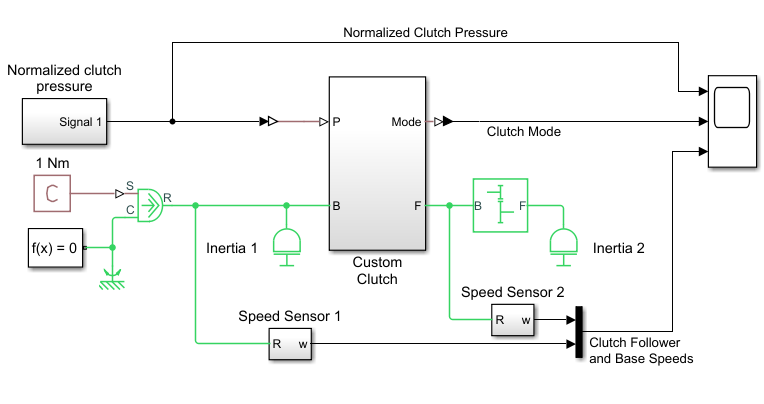
Custom Clutch Subsystem
Model Components
The clutch subsystem is positioned between the Inertia 1 and Simple Gear blocks and reports the clutch mode (forward, reverse, locked).
The PS Constant block replaces the sinusoidal signal as the torque input. The torque sensor blocks are omitted.
Simulink-PS Converter and PS-Simulink Converter blocks communicate between physical signals in the Simscape™ environment and Simulink® blocks such as a Scope block.
The Normalized clutch pressure block provides the programmed clutch pressure signal, normalized between 0 and 1, as shown in the following table. This signal is converted to a physical pressure inside the clutch subsystem.
Time Range (Seconds) Signal Value 0–2 0 2–4 0–0.8 with constant slope 4–6 0.8 6–7 0.8–0 with constant slope 7–10 0
Open the Scopes and start the simulation. The normalized clutch pressure signal follows the profile that you created in Signal Builder and determines the behavior of the model.
From 0 to 2 seconds, the velocity of Inertia 1 increases linearly because it is subject to a constant torque.
At 2 seconds, the clutch begins to engage, and Inertia 2 begins to spin. The velocity of Inertia 1 continues to rise, although at a slower rate, because the two inertias now share the external torque.
At 4 seconds, the pressure reaches its maximum. At about 5.32 seconds, the clutch locks. The driveshafts connected by the clutch now spin together. Inertia 1 and Inertia 2 continue to speed up at constant accelerations, Inertia 2 at half the velocity of Inertia 1.
At 6 seconds, the clutch begins to disengage as the pressure drops. Inertia 1 and Inertia 2 continue to accelerate with the applied torque.
The clutch unlocks at about 6.73 seconds and fully disengages at 7 seconds. (The clutch unlocks a little before completely disengaging because the pressure, even before vanishing, becomes too small to maintain the lock.) Inertia 1 is still accelerating. But Inertia 2, now free of the driveshaft and its torque, no longer accelerates and instead spins at a constant rate without frictional loss.
While the two shafts are locked, from 5.32–6.73 seconds, Inertia 1 and Inertia 2 spin in a fixed 2:1 ratio, because of the Simple Gear.
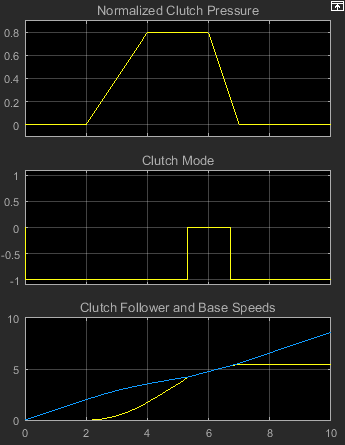
How the Clutch Mode Indicates Locking and Unlocking
The Clutch mode signal indicates the relative motion of its two connected shafts. From 0 to 5.32 seconds, the two shafts are moving relative to one another. The follower (driven) shaft is slower than the base (drive) shaft, so the mode signal is –1. Once the two shafts lock, their relative velocity is 0, and the mode signal switches to 0. At 6.73 seconds, they unlock, and the drive (base) shaft starts accelerating faster than the driven (follower) shaft. The mode signal switches back to –1.