fir2
Frequency sampling-based FIR filter design
Description
b = fir2(n,f,m)nth-order FIR filter with frequency-magnitude
characteristics specified in the vectors f and m.
The function linearly interpolates the desired frequency response
onto a dense grid and then uses the inverse Fourier transform and
a Hamming window to obtain the filter coefficients.
Examples
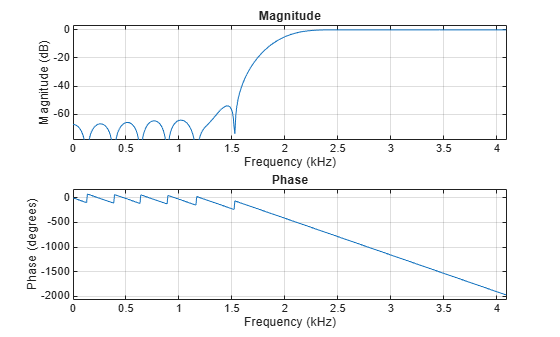
Load the MAT file chirp. The file contains a signal, y, sampled at a frequency Fs = 8192 Hz. The signal has most of its power above Fs/4 = 2048 Hz, or half the Nyquist frequency. Add random noise to the signal.
load chirp
y = y + randn(size(y))/25;
t = (0:length(y)-1)/Fs;Design a 34th-order FIR highpass filter to attenuate the components of the signal below Fs/4. Specify a normalized cutoff frequency of 0.48, which corresponds to about 1966 Hz. Visualize the frequency response of the filter.
f = [0 0.48 0.48 1]; mhi = [0 0 1 1]; bhi = fir2(34,f,mhi); freqz(bhi,1,[],Fs)
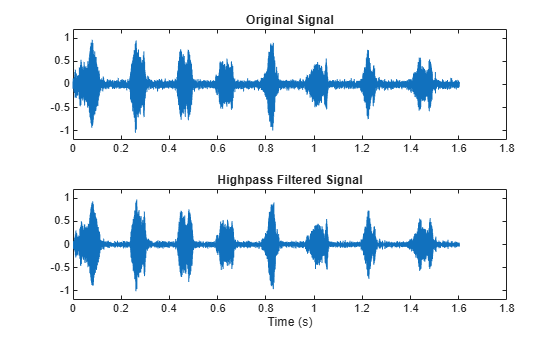
Filter the chirp signal. Plot the signal before and after filtering.
outhi = filter(bhi,1,y); figure subplot(2,1,1) plot(t,y) title('Original Signal') ylim([-1.2 1.2]) subplot(2,1,2) plot(t,outhi) title('Highpass Filtered Signal') xlabel('Time (s)') ylim([-1.2 1.2])
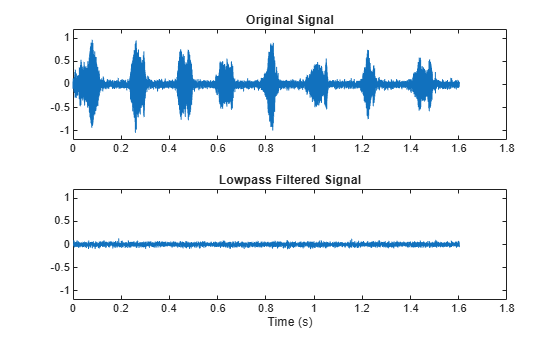
Change the filter from highpass to lowpass. Use the same order and cutoff. Filter the signal again. The result is mostly noise.
mlo = [1 1 0 0]; blo = fir2(34,f,mlo); outlo = filter(blo,1,y); subplot(2,1,1) plot(t,y) title('Original Signal') ylim([-1.2 1.2]) subplot(2,1,2) plot(t,outlo) title('Lowpass Filtered Signal') xlabel('Time (s)') ylim([-1.2 1.2])
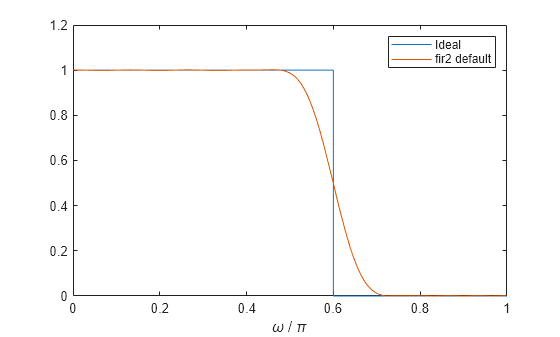
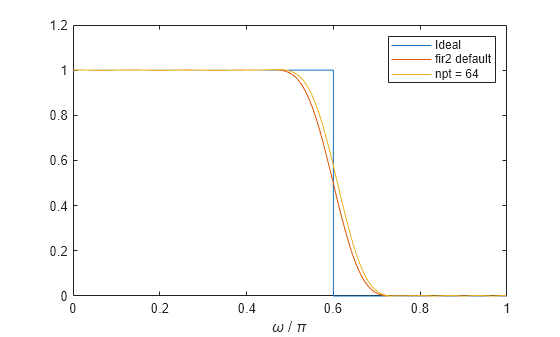
Design a 30th-order lowpass filter with a normalized cutoff frequency of rad/sample. Plot the ideal frequency response overlaid with the actual frequency response.
f = [0 0.6 0.6 1]; m = [1 1 0 0]; b1 = fir2(30,f,m); [h1,w] = freqz(b1,1); plot(f,m,w/pi,abs(h1)) xlabel('\omega / \pi') lgs = {'Ideal','fir2 default'}; legend(lgs)
Redesign the filter using a 64-point interpolation grid.
b2 = fir2(30,f,m,64); h2 = freqz(b2,1); hold on plot(w/pi,abs(h2)) lgs{3} = 'npt = 64'; legend(lgs)
Redesign the filter using the 64-point interpolation grid and a 13-point interval around the cutoff frequency.
b3 = fir2(30,f,m,64,13);
h3 = freqz(b3,1);
plot(w/pi,abs(h3))
lgs{4} = 'lap = 13';
legend(lgs)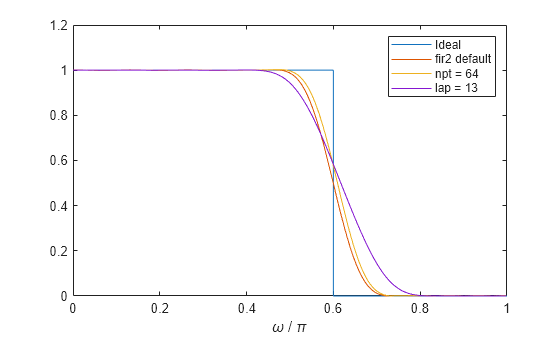
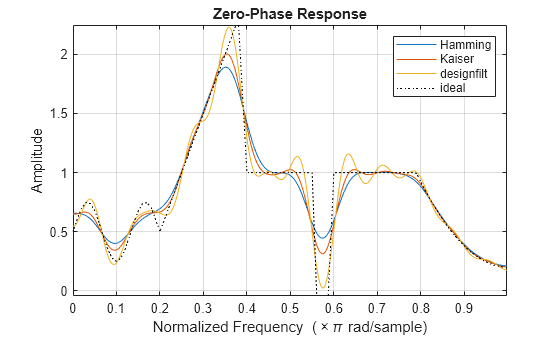
Design an FIR filter with the following frequency response:
A sinusoid between 0 and rad/sample.
F1 = 0:0.01:0.18; A1 = 0.5+sin(2*pi*7.5*F1)/4;
A piecewise linear section between rad/sample and rad/sample.
F2 = [0.2 0.38 0.4 0.55 0.562 0.585 0.6 0.78]; A2 = [0.5 2.3 1 1 -0.2 -0.2 1 1];
A quadratic section between rad/sample and the Nyquist frequency.
F3 = 0.79:0.01:1; A3 = 0.2+18*(1-F3).^2;
Design the filter using a Hamming window. Specify a filter order of 50.
N = 50; FreqVect = [F1 F2 F3]; AmplVect = [A1 A2 A3]; ham = fir2(N,FreqVect,AmplVect);
Repeat the calculation using a Kaiser window that has a shape parameter of 3.
kai = fir2(N,FreqVect,AmplVect,kaiser(N+1,3));
Redesign the filter using the designfilt function. designfilt uses a rectangular window by default. Compute the zero-phase response of the filter over 1024 points.
d = designfilt('arbmagfir','FilterOrder',N, ... 'Frequencies',FreqVect,'Amplitudes',AmplVect); [zd,wd] = zerophase(d,1024);
Display the zero-phase responses of the three filters. Overlay the ideal response.
zerophase(ham,1) hold on zerophase(kai,1) plot(wd/pi,zd) plot(FreqVect,AmplVect,'k:') legend('Hamming','Kaiser','designfilt','ideal')
Input Arguments
Output Arguments
Algorithms
fir2 uses frequency sampling to design filters.
The function interpolates the desired frequency response linearly
onto a dense, evenly spaced grid of length npt. fir2 also
sets up regions of lap points around repeated
values of f to provide steep but smooth transitions.
To obtain the filter coefficients, the function applies an inverse
fast Fourier transform to the grid and multiplies by window.
References
[1] Jackson, L. B. Digital Filters and Signal Processing. 3rd Ed. Boston: Kluwer Academic Publishers, 1996.
[2] Mitra, Sanjit K. Digital Signal Processing: A Computer Based Approach. New York: McGraw-Hill, 1998.
Extended Capabilities
Version History
Introduced before R2006a