stepz
Step response of digital filter
Syntax
Description
[
returns the step response of the digital filter represented as Cascaded Transfer Functions (CTF) with numerator coefficients h,t] = stepz(B,A,"ctf")B and denominator coefficients
A. (since R2024b)
stepz(___) with no output arguments plots the step
response of the filter.
Examples
Create a third-order Butterworth filter with normalized half-power frequency rad/sample. Display its step response.
[b,a] = butter(3,0.4); stepz(b,a)
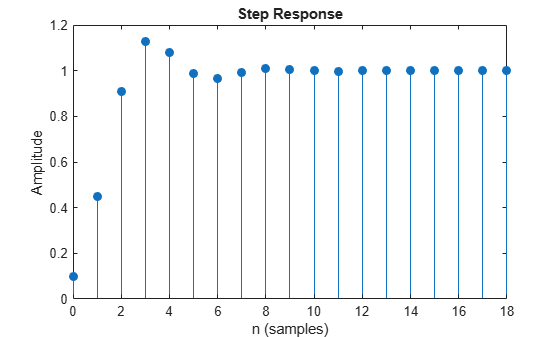
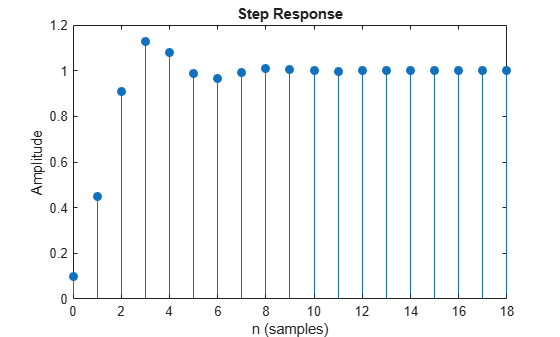
Create an identical filter using designfilt and display its step response.
d = designfilt('lowpassiir','FilterOrder',3,'HalfPowerFrequency',0.4); stepz(d)
Design a fourth-order lowpass elliptic filter with normalized passband frequency rad/sample. Specify a passband ripple of 0.5 dB and a stopband attenuation of 20 dB. Plot the first 50 samples of the filter's step response.
[b,a] = ellip(4,0.5,20,0.4); stepz(b,a,50)
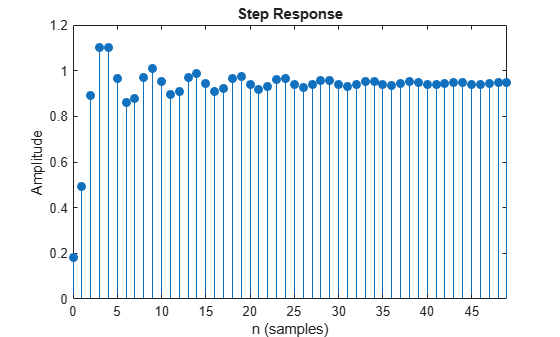
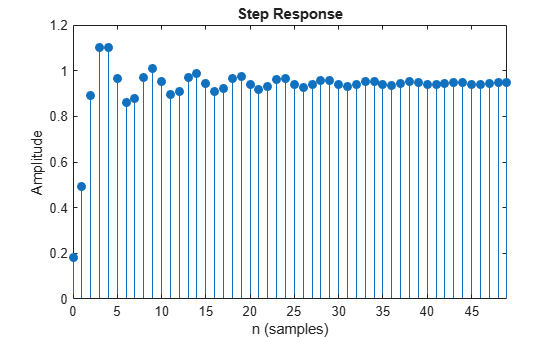
Create the same filter using designfilt and display its step response.
d = designfilt('lowpassiir','FilterOrder',4,'PassbandFrequency',0.4, ... 'PassbandRipple',0.5,'StopbandAttenuation',20, ... 'DesignMethod','ellip'); stepz(d,50)
Since R2024b
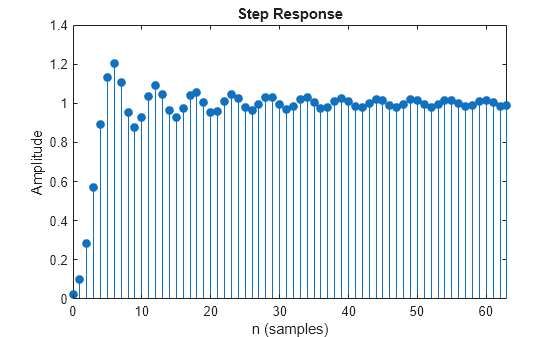
Design a 40th-order lowpass Chebyshev type II digital filter with a stopband edge frequency of 0.4 and stopband attenuation of 50 dB. Plot the first 64 samples of the filter step response using the filter coefficients in the CTF format.
[B,A] = cheby2(40,50,0.4,"ctf"); stepz(B,A,"ctf",64)
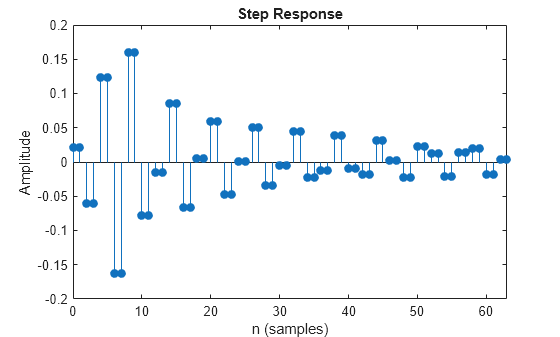
Design a 30th-order bandpass elliptic digital filter with passband edge frequencies of 0.3 and 0.7, passband ripple of 0.1 dB, and stopband attenuation of 50 dB. Plot the first 64 samples of the filter step response using the filter coefficients and gain in the CTF format.
[B,A,g] = ellip(30,0.1,50,[0.3 0.7],"ctf"); stepz({B,A,g},"ctf",64)
Input Arguments
Output Arguments
More About
Tips
You can obtain filters in
CTF format, including the scaling gain. Use the outputs of digital IIR filter design functions,
such as butter, cheby1, cheby2, and ellip. Specify the "ctf" filter-type argument in these
functions and specify to return B, A, and
g to get the scale values. (since R2024b)
Algorithms
stepz filters a length n step sequence using
filter(b,a,ones(1,n))
and plots the results using stem.
To compute n in the auto-length case, stepz either
uses n = length(b) for the FIR case, or first finds the poles using
p = roots(a) if length(a) is greater than 1.
If the filter is unstable, n is chosen to be the point at which the
term from the largest pole reaches 106 times its original value.
If the filter is stable, n is chosen to be the point at which the term
due to the largest amplitude pole is 5 × 10–5 of its original amplitude.
If the filter is oscillatory (poles on the unit circle only), stepz
computes five periods of the slowest oscillation.
If the filter has both oscillatory and damped terms, n is chosen to
equal five periods of the slowest oscillation or the point at which the term due to the pole
of largest nonunit amplitude is 5 × 10–5 times its original amplitude, whichever is greater.
stepz also allows for delays in the numerator polynomial. The number of
delays is incorporated into the computation for the number of samples.
References
[1] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.
Extended Capabilities
Version History
Introduced before R2006aSee Also
Apps
Functions
ctffilt|designfilt|digitalFilter|freqz|grpdelay|impz|phasez|zplane