Mechanical Systems
Explore examples that illustrate modeling, control, and simulation of mechanical systems.
Related Information
Featured Examples
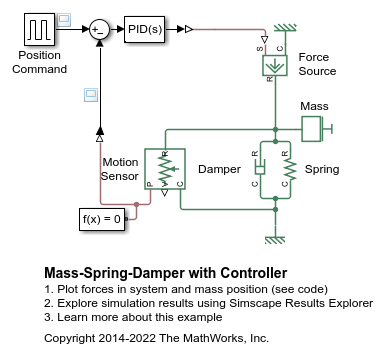
Mass-Spring-Damper with Controller
A controlled mass-spring-damper. A controller adjusts the force on the mass to have its position track a command signal. The initial velocity for the mass is 10 meters per second. The controller adjusts the force applied by the Force Source to track the step changes to the input signal.
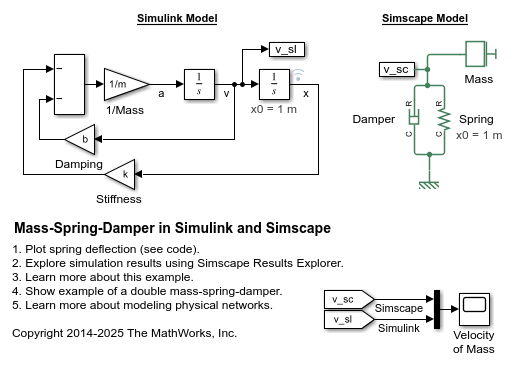
Mass-Spring-Damper in Simulink and Simscape
Compares a mass-spring-damper model that uses Simscape™ blocks and physical connections to a model that uses Simulink® blocks and signals.
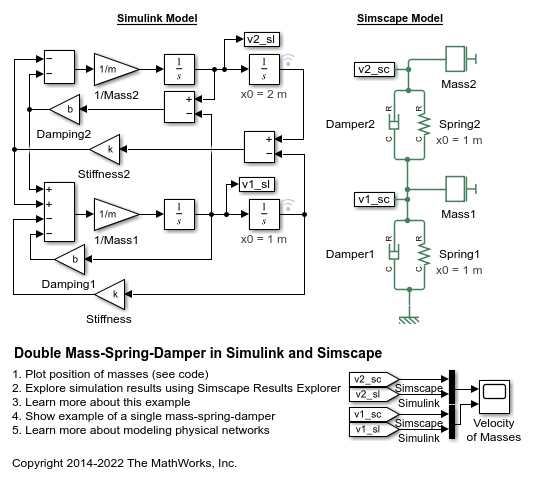
Double Mass-Spring-Damper in Simulink and Simscape
Two models of a double mass-spring-damper, one using Simulink® input/output blocks and one using Simscape™ physical networks.
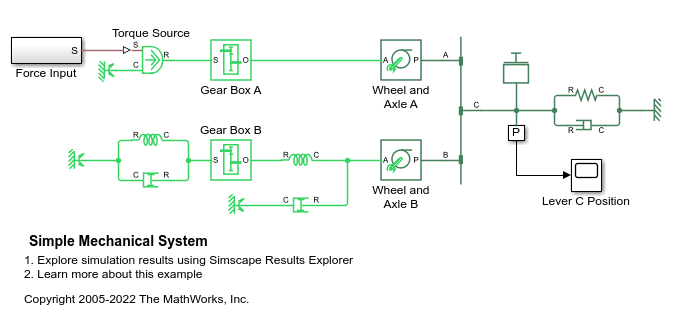
Simple Mechanical System
A model of a system that connects rotational and translational motion. A summing lever drives a load consisting of a mass, viscous friction, and a spring connected to its joint C. Joint B is suspended on two rotational springs connected to reference point through a wheel and axle and a gear box. Joint A is connected to a torque source through a gear box and a wheel and axle mechanism.

Mechanical System with Translational Friction
A mass attached to a spring and a viscous damper. The mass is driven by an ideal velocity source through a friction element. The motion profile of the source is selected in such a way that plotting the displacement of the mass against the displacement provided by the source produces a typical hysteresis curve.

Mechanical System with Translational Hard Stop
Two masses connected by a hard stop. Mass 1 is driven by an Ideal Velocity Source. As the velocity input changes direction, Mass 2 will stay at rest until Mass 1 reaches the other end of the backlash modeled by the Translational Hard Stop. Plotting the displacement of Mass 2 against the displacement of the Mass 1 produces a typical hysteresis curve.
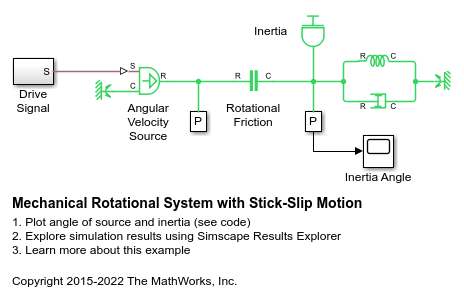
Mechanical Rotational System with Stick-Slip Motion
A mechanical rotational system with stick-slip friction. An inertia is connected to a fixed point by spring and damper. The inertia is driven by a velocity source via a stick-slip friction element. The friction element has a difference between the breakaway and the Coulomb frictions, resulting in stick-slip motion of the inertia.

Linkage Mechanism
The use of the Simscape™ Lever block in a linkage mechanism. Lever 1 and Lever 4 are first class levers with the fulcrum at the end. Lever 3 is a second class lever with the fulcrum in the middle. Lever 2 is a summing lever driven by the first and the third levers.
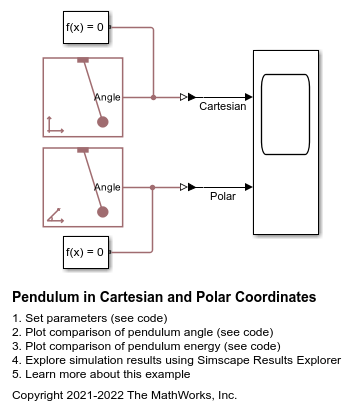
Pendulum in Cartesian and Polar Coordinates
Two different implementations of a planar pendulum.
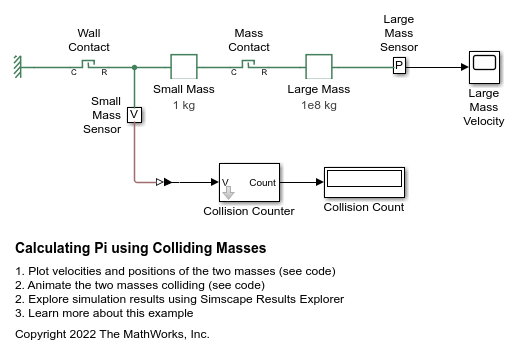
Calculating Pi Using Colliding Masses
Uses a well-known physics problem to demonstrate solver performance by capturing tens of thousands of instantaneous events that occur in under a second. On a one-dimensional path, a large mass approaches a small mass bounded by a wall on the far side. As the large mass strikes the small mass, the small mass bounces off the wall and reverses direction toward the large mass. Each collision is perfectly elastic. As the large mass approaches the wall, collisions with the small mass occur more and more rapidly until the large mass reverses direction and eventually travels fast enough in the opposite direction that the small mass never catches it.