bboxcrop
Crop bounding boxes
Syntax
Description
[___] = bboxcrop(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example, Name=Value)OverlapThreshold=1, sets
the positive overlap threshold to 1.
Examples
Read an image.
I = imread('peppers.png');Define bounding boxes and labels.
bboxA = [
410 230 100 90
186 78 80 60
]bboxA = 2×4
410 230 100 90
186 78 80 60
labelsA = [
"garlic"
"onion"
];Create a center cropping window.
targetSize = [256 256]; win = centerCropWindow2d(size(I),targetSize);
Center crop the image.
[r,c] = deal(win.YLimits(1):win.YLimits(2),win.XLimits(1):win.XLimits(2)); J = I(r,c,:);
Center crop boxes and labels. Boxes outside the cropping window are removed.
[bboxB,indices] = bboxcrop(bboxA,win); labelsB = labelsA(indices);
Display the results.
figure I = insertObjectAnnotation(I,'Rectangle',bboxA,labelsA); J = insertObjectAnnotation(J,'Rectangle',bboxB,labelsB); imshowpair(I,J,'montage')

Input Arguments
Bounding boxes, specified as an M-by-4, M-by-5, or M-by-9 nonsparse numeric matrix. M is the number of bounding boxes. Each row of the matrix defines a bounding box as either an axis-aligned rectangle, a rotated rectangle, or a cuboid. This table describes the format for each bounding box.
| Bounding Box | Description |
|---|---|
| Axis-aligned rectangle |
Defined in spatial coordinates as an M-by-4 numeric matrix with rows of the form [x y w h], where:
|
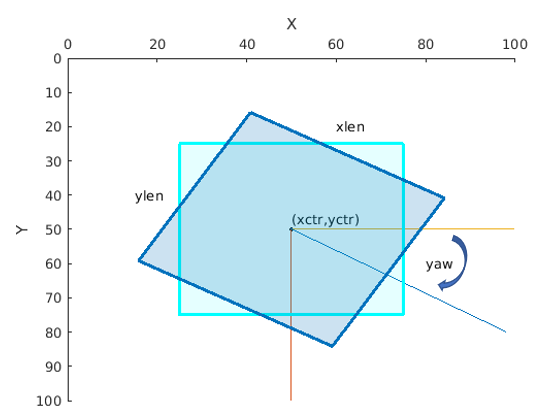
| Rotated rectangle |
Defined in spatial coordinates as an M-by-5 numeric matrix with rows of the form [xctr yctr xlen ylen yaw], where:
|
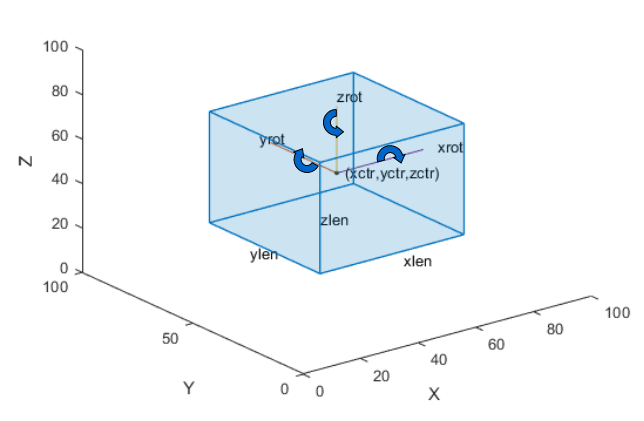
| Cuboid |
Defined in spatial coordinates as an M-by-9 numeric matrix with rows of the form [xctr yctr zctr xlen ylen zlen xrot yrot zrot], where:
The figure shows how these values determine the position of a cuboid.
|
Cropping window, specified as a four-element vector, a six-element vector, or a
Cuboid object. The
output bounding box positions are relative to the location of the cropping
window.
When you specify bboxA as a rectangular input, the cropping
window must be a four-element vector in the format
[x,y,width,height],
or a Rectangle
object.
When you specify bboxA as a cuboid, the cropping window must be
a six-element vector in the format
[x,y,zwidth,height,depth],
or a Cuboid object.
Name-Value Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2019bSee Also
imcrop | bboxresize | bboxwarp | bboxerase