Ground Plane and Obstacle Detection Using Lidar
This example shows how to process 3-D lidar data from a sensor mounted on a vehicle by segmenting the ground plane (plane below the vehicle), and finding nearby obstacles. This can facilitate drivable path planning for vehicle navigation. The example also shows how to visualize streaming lidar data.
Create a Velodyne File Reader
The lidar data used in this example was recorded using a Velodyne® HDL32E sensor mounted on a vehicle. Set up a velodyneFileReader
fileName = 'lidarData_ConstructionRoad.pcap'; deviceModel = 'HDL32E'; veloReader = velodyneFileReader(fileName, deviceModel);
Read a Lidar Scan
Each scan of lidar data is stored as a 3-D point cloud. Efficiently processing this data using fast indexing and search is key to the performance of the sensor processing pipeline. This efficiency is achieved using the pointCloud
The veloReader constructs an organized pointCloud for each lidar scan. The Location property of the pointCloud is an M-by-N-by-3 matrix, containing the XYZ coordinates of points in meters. The point intensities are stored in Intensity.
% Read a scan of lidar data ptCloud = readFrame(veloReader) %#ok<NOPTS>
ptCloud =
pointCloud with properties:
Location: [32×1083×3 single]
Count: 34656
XLimits: [-80.0444 87.1780]
YLimits: [-85.6287 92.8721]
ZLimits: [-21.6060 14.3558]
Color: []
Normal: []
Intensity: [32×1083 uint8]
Setup Streaming Point Cloud Display
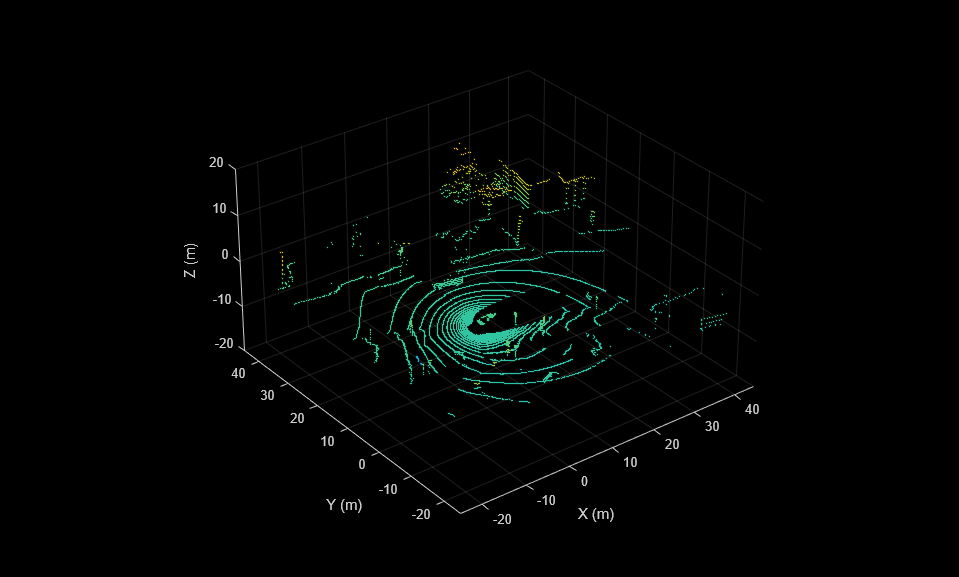
The pcplayer can be used to visualize streaming point cloud data. Set up the region around the vehicle to display by configuring pcplayer
% Specify limits of point cloud display xlimits = [-25 45]; % meters ylimits = [-25 45]; zlimits = [-20 20]; % Create a pcplayer lidarViewer = pcplayer(xlimits, ylimits, zlimits); % Customize player axes labels xlabel(lidarViewer.Axes, 'X (m)') ylabel(lidarViewer.Axes, 'Y (m)') zlabel(lidarViewer.Axes, 'Z (m)') % Display the raw lidar scan view(lidarViewer, ptCloud)
In this example, we will be segmenting points belonging to the ground plane, the ego vehicle and nearby obstacles. Set the colormap for labeling these points.
% Define labels to use for segmented points colorLabels = [... 0 0.4470 0.7410; ... % Unlabeled points, specified as [R,G,B] 0.4660 0.6740 0.1880; ... % Ground points 0.9290 0.6940 0.1250; ... % Ego points 0.6350 0.0780 0.1840]; % Obstacle points % Define indices for each label colors.Unlabeled = 1; colors.Ground = 2; colors.Ego = 3; colors.Obstacle = 4; % Set the colormap colormap(lidarViewer.Axes, colorLabels)

Segment the Ego Vehicle
The lidar is mounted on top of the vehicle, and the point cloud may contain points belonging to the vehicle itself, such as on the roof or hood. Knowing the dimensions of the vehicle, we can segment out points that are closest to the vehicle.
Create a vehicleDimensions (Automated Driving Toolbox)
vehicleDims = vehicleDimensions(); % Typical vehicle 4.7m by 1.8m by 1.4m
Specify the mounting location of the lidar in the vehicle coordinate system. The vehicle coordinate system is centered at the center of the rear-axle, on the ground, with positive X direction pointing forward, positive Y towards the left, and positive Z upwards. In this example, the lidar is mounted on the top center of the vehicle, parallel to the ground.
mountLocation = [... vehicleDims.Length/2 - vehicleDims.RearOverhang, ... % x 0, ... % y vehicleDims.Height]; % z
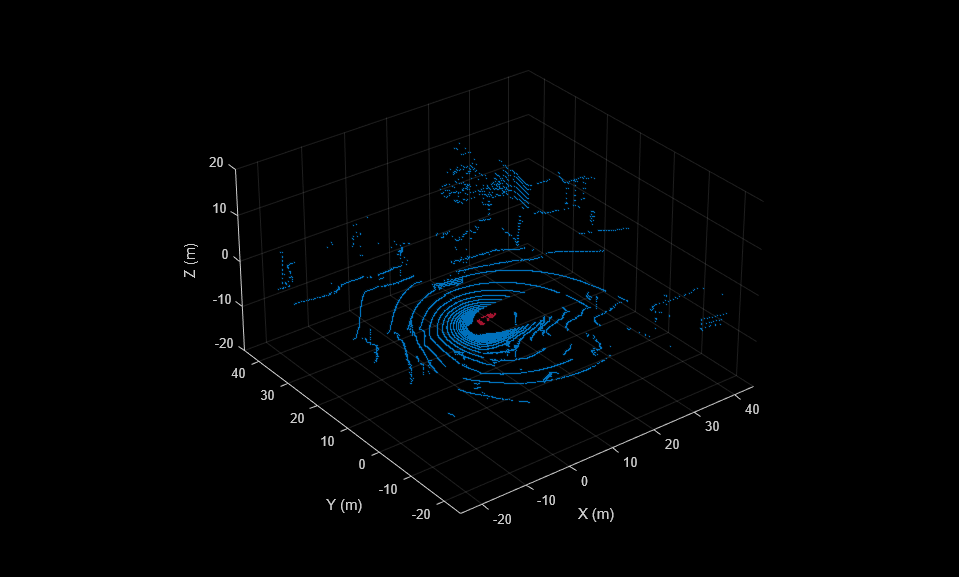
Segment the ego vehicle using the helper function helperSegmentEgoFromLidarData. This function segments all points within the cuboid defined by the ego vehicle. Store the segmented points in a struct points.
points = struct(); points.EgoPoints = helperSegmentEgoFromLidarData(ptCloud, vehicleDims, mountLocation);
Visualize the point cloud with segmented ego vehicle. Use the helperUpdateView helper function.
closePlayer = false; helperUpdateView(lidarViewer, ptCloud, points, colors, closePlayer);
Segment Ground Plane and Nearby Obstacles
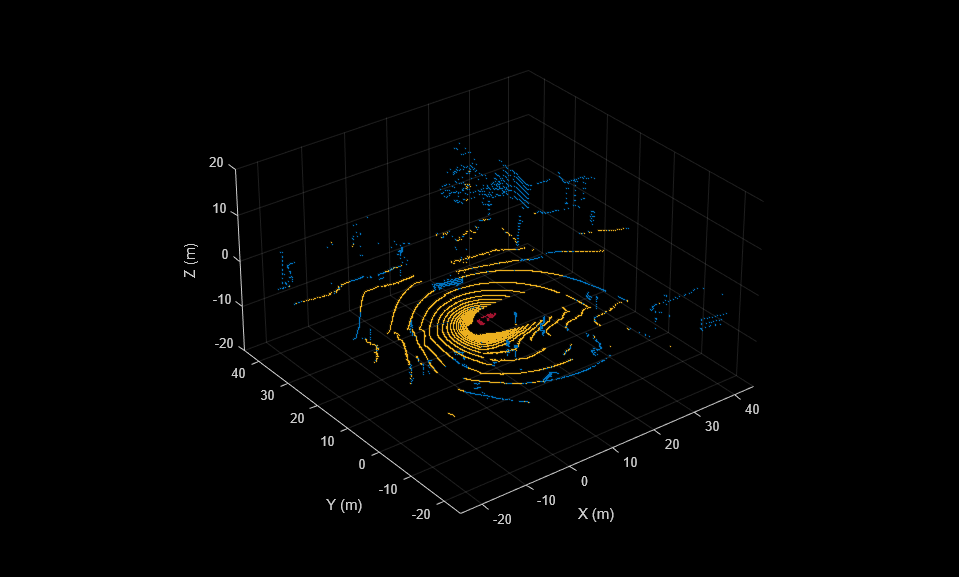
In order to identify obstacles from the lidar data, first segment the ground plane using the segmentGroundFromLidarData
elevationDelta = 10; points.GroundPoints = segmentGroundFromLidarData(ptCloud, 'ElevationAngleDelta', elevationDelta); % Visualize the segmented ground plane. helperUpdateView(lidarViewer, ptCloud, points, colors, closePlayer);
Remove points belonging to the ego vehicle and the ground plane by using the select'OutputSize' as 'full' to retain the organized nature of the point cloud.
nonEgoGroundPoints = ~points.EgoPoints & ~points.GroundPoints; ptCloudSegmented = select(ptCloud, nonEgoGroundPoints, 'OutputSize', 'full');
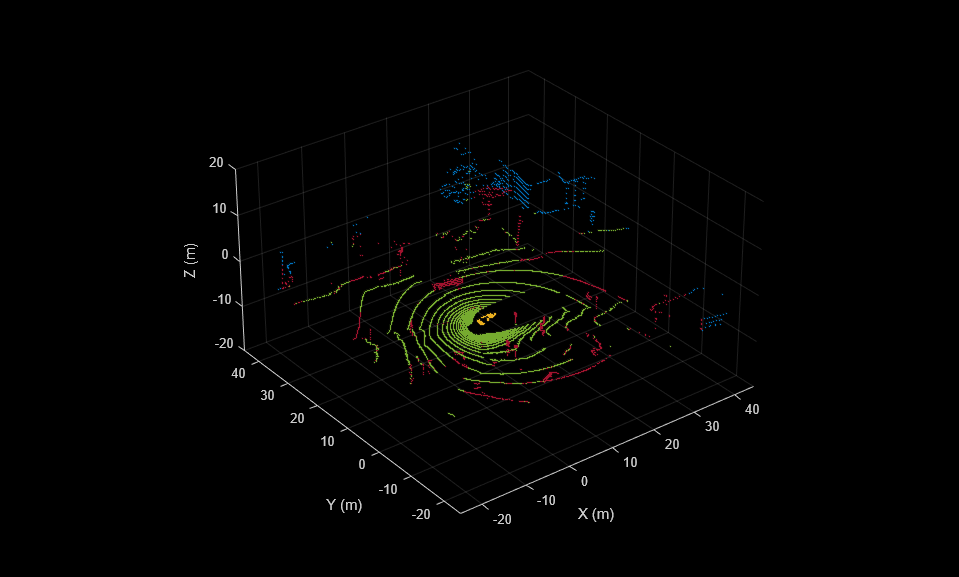
Next, segment nearby obstacles by looking for all points that are not part of the ground or ego vehicle within some radius from the ego vehicle. This radius can be determined based on the range of the lidar and area of interest for further processing.
sensorLocation = [0, 0, 0]; % Sensor is at the center of the coordinate system radius = 40; % meters points.ObstaclePoints = findNeighborsInRadius(ptCloudSegmented, ... sensorLocation, radius); % Visualize the segmented obstacles helperUpdateView(lidarViewer, ptCloud, points, colors, closePlayer);
Process Lidar Sequence
Now that the point cloud processing pipeline for a single lidar scan has been laid out, put this all together to process the sequence of recorded data. The code below is shortened since the key parameters have been defined in the previous steps. Here, the parameters are used without further explanation.
% Rewind the |veloReader| to start from the beginning of the sequence reset(veloReader); isPlayerOpen = true; while hasFrame(veloReader) && isPlayerOpen % Grab the next lidar scan ptCloud = readFrame(veloReader); % Segment points belonging to the ego vehicle points.EgoPoints = helperSegmentEgoFromLidarData(ptCloud, vehicleDims, mountLocation); % Segment points belonging to the ground plane points.GroundPoints = segmentGroundFromLidarData(ptCloud, 'ElevationAngleDelta', elevationDelta); % Remove points belonging to the ego vehicle and ground plane nonEgoGroundPoints = ~points.EgoPoints & ~points.GroundPoints; ptCloudSegmented = select(ptCloud, nonEgoGroundPoints, 'OutputSize', 'full'); % Segment obstacles points.ObstaclePoints = findNeighborsInRadius(ptCloudSegmented, sensorLocation, radius); closePlayer = ~hasFrame(veloReader); % Update lidar display isPlayerOpen = helperUpdateView(lidarViewer, ptCloud, points, colors, closePlayer); end snapnow
Supporting Functions
helperSegmentEgoFromLidarData segments points belonging to the ego vehicle given the dimensions of the vehicle and mounting location.
function egoPoints = helperSegmentEgoFromLidarData(ptCloud, vehicleDims, mountLocation) %helperSegmentEgoFromLidarData segment ego vehicle points from lidar data % egoPoints = helperSegmentEgoFromLidarData(ptCloud,vehicleDims,mountLocation) % segments points belonging to the ego vehicle of dimensions vehicleDims % from the lidar scan ptCloud. The lidar is mounted at location specified % by mountLocation in the vehicle coordinate system. ptCloud is a % pointCloud object. vehicleDimensions is a vehicleDimensions object. % mountLocation is a 3-element vector specifying XYZ location of the % lidar in the vehicle coordinate system. % % This function assumes that the lidar is mounted parallel to the ground % plane, with positive X direction pointing ahead of the vehicle, % positive Y direction pointing to the left of the vehicle in a % right-handed system. % Buffer around ego vehicle bufferZone = [0.1, 0.1, 0.1]; % in meters % Define ego vehicle limits in vehicle coordinates egoXMin = -vehicleDims.RearOverhang - bufferZone(1); egoXMax = egoXMin + vehicleDims.Length + bufferZone(1); egoYMin = -vehicleDims.Width/2 - bufferZone(2); egoYMax = egoYMin + vehicleDims.Width + bufferZone(2); egoZMin = 0 - bufferZone(3); egoZMax = egoZMin + vehicleDims.Height + bufferZone(3); egoXLimits = [egoXMin, egoXMax]; egoYLimits = [egoYMin, egoYMax]; egoZLimits = [egoZMin, egoZMax]; % Transform to lidar coordinates egoXLimits = egoXLimits - mountLocation(1); egoYLimits = egoYLimits - mountLocation(2); egoZLimits = egoZLimits - mountLocation(3); % Use logical indexing to select points inside ego vehicle cube egoPoints = ptCloud.Location(:,:,1) > egoXLimits(1) ... & ptCloud.Location(:,:,1) < egoXLimits(2) ... & ptCloud.Location(:,:,2) > egoYLimits(1) ... & ptCloud.Location(:,:,2) < egoYLimits(2) ... & ptCloud.Location(:,:,3) > egoZLimits(1) ... & ptCloud.Location(:,:,3) < egoZLimits(2); end
helperUpdateView updates the streaming point cloud display with the latest point cloud and associated color labels.
function isPlayerOpen = helperUpdateView(lidarViewer, ptCloud, points, colors, closePlayer) %helperUpdateView update streaming point cloud display % isPlayerOpen = helperUpdateView(lidarViewer, ptCloud, points, colors, closePlayers) % updates the pcplayer object specified in lidarViewer with a new point % cloud ptCloud. Points specified in the struct points are colored % according to the colormap of lidarViewer using the labels specified by % the struct colors. closePlayer is a flag indicating whether to close % the lidarViewer. if closePlayer hide(lidarViewer); isPlayerOpen = false; return; end scanSize = size(ptCloud.Location); scanSize = scanSize(1:2); % Initialize colormap colormapValues = ones(scanSize, 'like', ptCloud.Location) * colors.Unlabeled; if isfield(points, 'GroundPoints') colormapValues(points.GroundPoints) = colors.Ground; end if isfield(points, 'EgoPoints') colormapValues(points.EgoPoints) = colors.Ego; end if isfield(points, 'ObstaclePoints') colormapValues(points.ObstaclePoints) = colors.Obstacle; end % Update view view(lidarViewer, ptCloud.Location, colormapValues) % Check if player is open isPlayerOpen = isOpen(lidarViewer); end