PMLSM SimScape Block and Force Constant
Hi All,
Using the PMLSM SimScape block for my FOC PMLSM model - PMLSM
In the example ee_pmlsm_drive.slx which i have based my FOC architedure on, have a few questions please.
There is a gain block after the outer loop velocity controller (iq_Ref), which is the inverse of the Force constant (Kt) shown as (2/3*Np*PM) in the literature. This is also used in the PMSM FOC model, placed after the torque limiter Tq to iq_Ref. Why is this inverse Kt gain added to the idq_ref signal? Does this cancel Kt if its used in the Force Equation?
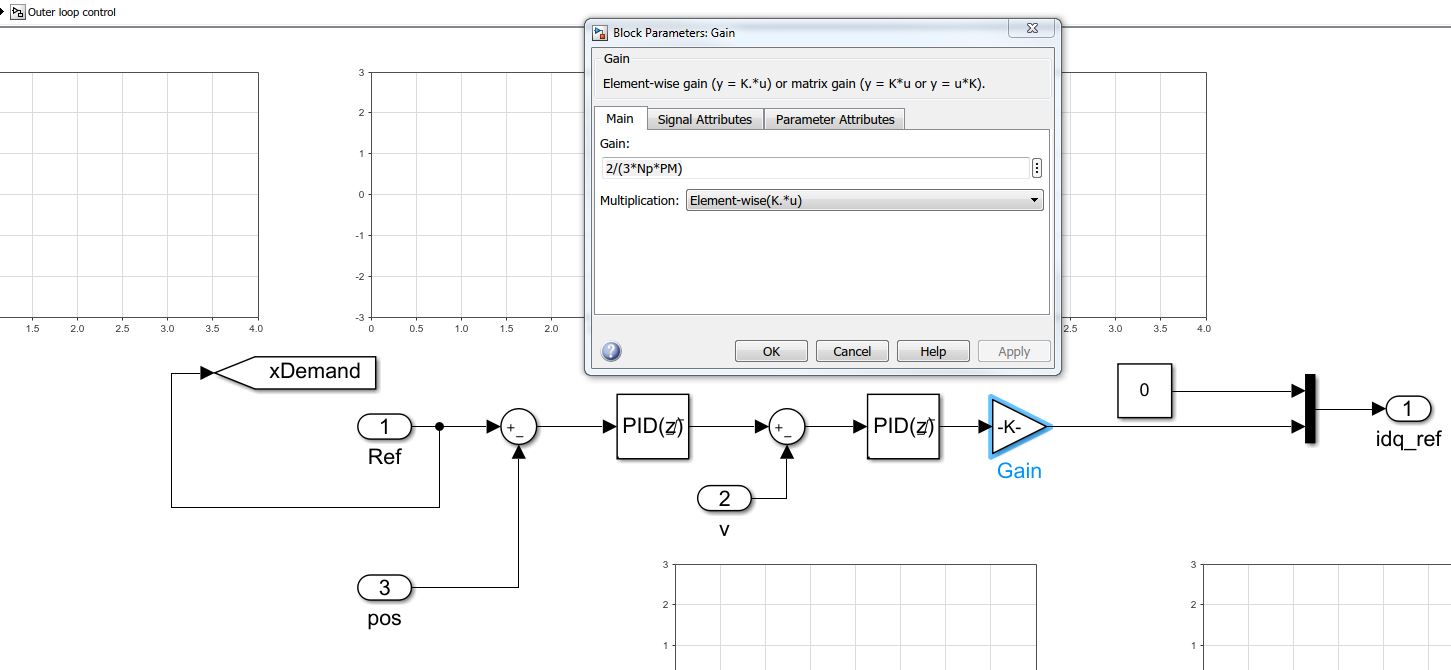
Previous help posts regarding the Force Constant (Kt), imply emitting the constant (3/2) in Kt. Also in the PMLSM help center document states Ke, Kt and Flux linkage are equal. Does this simplification apply to the translational machine counterpart SimScape block?
I have tried to look into the SimScape block code of the PMLSM to confirm, how do i look under the mask to check the Force equation for the PMLSM to confirm Kt and Ke used in this model?
Any help would be great as this is holding up Validation of my "small signal" linear PMLSM model against the SimScape PMLSM block model.
Thanks
Patrick
2 Comments
Time DescendingHello Patrick,
most Simscape blocks are currently black box, meaning that you do not have access to the source code. If you have evidence that the block is not behaving as expected, you can submit a bug report or ask for technical help through MathWorks support.
As to the scaling. It is technically not necessary, as the PID controller could be tuned without it there. However, knowing the physical structure allows us to know that the control signal is proprtional to this constant. It helpful to tune the controller with a preset gain afterwards to shift it to the specific current reference that it should be. It is a good practice to split the controller like this (with the gain external) because it does a better job of splitting the fundamental equations used in the controller so that if something like pole pairs change, the controller can be scaled without having to retune.
Regards,
Joel
Hi Joel,
Sorry for the delay in the response.
Interesting, does this mean the torque constant Kt is effectively cancelled after the speed controller, hence, control output to the plant is solely iq current?
Thanks