Guidance, Navigation, and Control (GNC)
Use guidance blocks to calculate distance between two vehicles, controller blocks to control the movement of vehicles, such as the vehicle path, location, and velocity, and the forces on the vehicle. Use navigation blocks to model accelerometers, gyroscopes, and inertial measurement units (IMU) on each of three axes; an IMU that contains one three-axis accelerometer and one three-axis gyroscope. Implement pilot crossover, precision, and Tustin models.
Categories
- Guidance
Calculate range between two vehicles
- Navigation
Implement three-axis measurement of accelerations, angular rates, inertias
- Control
Simulate various controllers, such as one-dimensional, two-dimensional, three-dimensional types
- Actuators
Represent linear and nonlinear actuators with saturation and rate limits
- Pilot Models
Implement pilot models
- Flight Control Analysis
Analyze the motion and dynamics of aerospace vehicles
- Flight Parameters
Calculate aerospace parameters such as ideal airspeed correction, Mach number, dynamic pressure
- Trajectories
Create reference signals for standard trajectories in multivehicle simulations
Featured Examples

Lightweight Airplane Design
Address the technical and process challenges of aircraft design using the design of a lightweight aircraft.
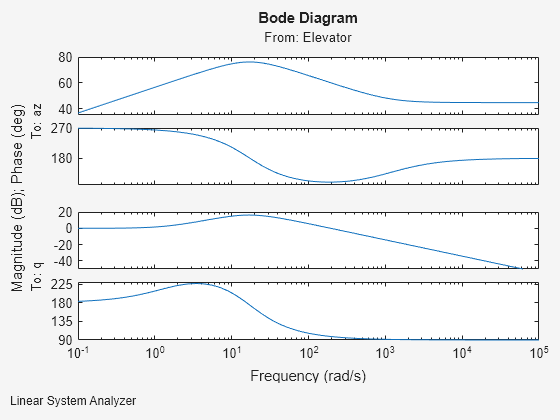
Airframe Trim and Linearize with Simulink Control Design
Trim and linearize an airframe with Simulink® Control Design™.
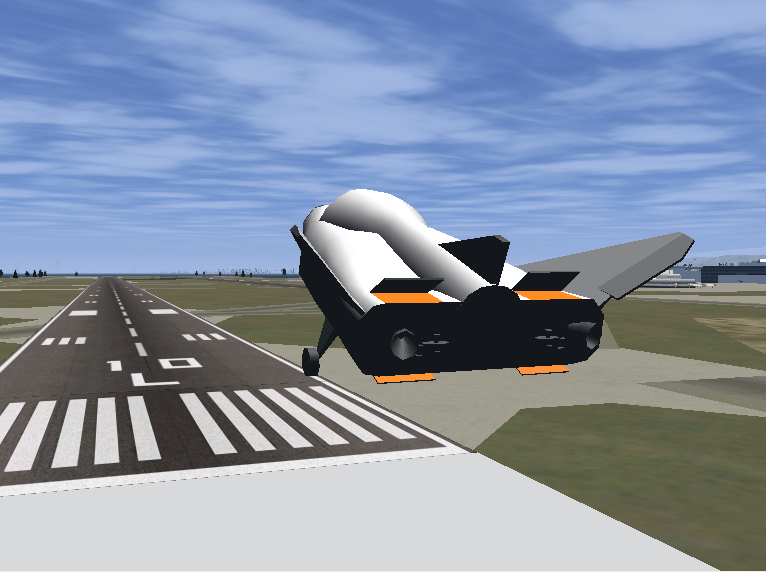
HL-20 Project with Optional FlightGear Interface
Model NASA HL-20 lifting body and controller modeled in Simulink and Aerospace Blockset™, using FlightGear for visualization.
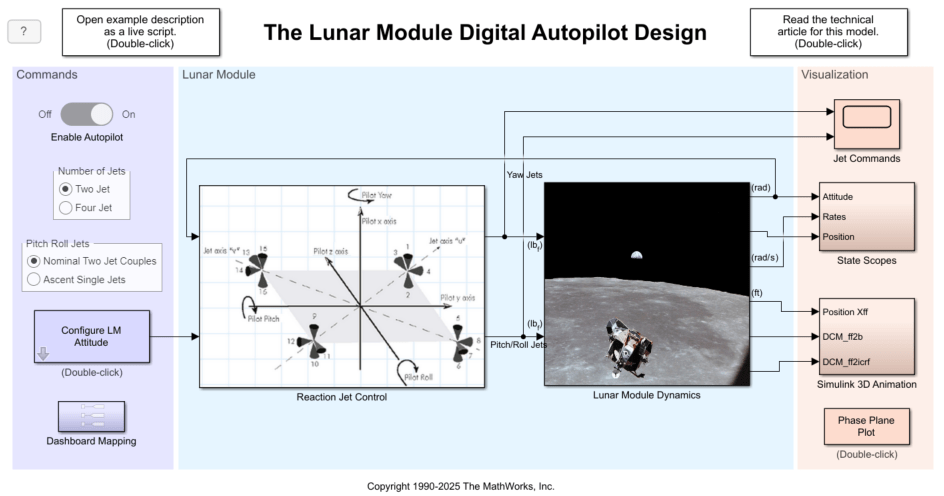
Developing the Apollo Lunar Module Digital Autopilot
Develop Apollo Lunar Module digital autopilot using Simulink and Aerospace Blockset.
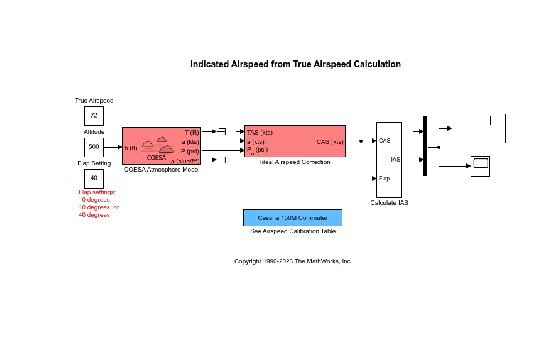
Indicated Airspeed from True Airspeed Calculation
Compute the indicated airspeed from true airspeed using the Ideal Airspeed Correction block.
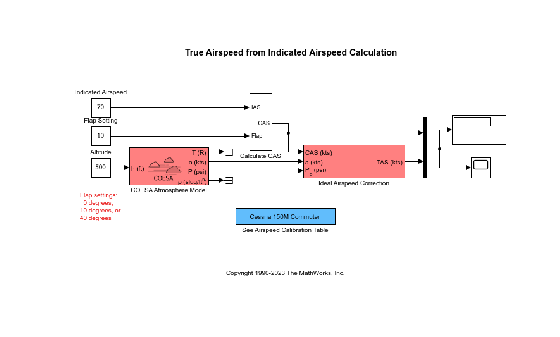
True Airspeed from Indicated Airspeed Calculation
Compute the indicated airspeed from true airspeed using the Ideal Airspeed Correction block.
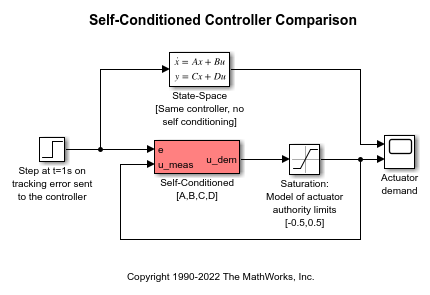
Self-Conditioned Controller Comparison
Compare the implementation of a state-space controller [A,B,C,D] in a self-conditioned form versus a typical state-space controller [A,B,C,D].

Transition from Low- to High-Fidelity UAV Models in Three Stages
Evolve UAV plant model continuously to stay in sync with the latest information available.
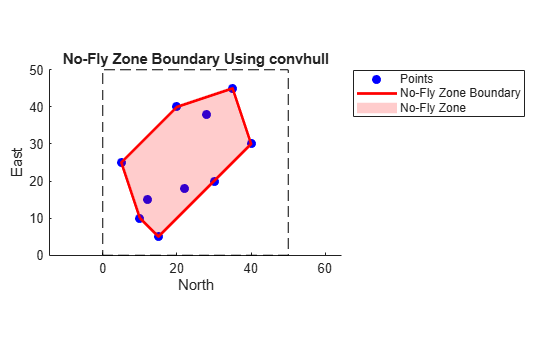
Generate Trajectory Live Editor Task for Flight Mission with No-Fly Zones
Use the Generate Trajectory live task to create a polynomial trajectory with no-fly zones using waypoints.