Self-Conditioned [A,B,C,D]
Implement state-space controller in self-conditioned form
Libraries:
Aerospace Blockset /
GNC /
Control
Description
in the self-conditioned form
The input is a vector of the achieved actuator positions, and the output is the vector of controller actuator demands. In the case that the actuators are not limited, then and substituting the output equation into the state equation returns the nominal controller. In the case that they are not equal, the dynamics of the controller are set by the poles of A-HC.
Hence H must be chosen to make the poles
sufficiently fast to track but
at the same time not so fast that noise on e is propagated to . The matrix H is
designed by a callback to the Control System Toolbox™ command place to place the poles at defined locations.
Examples
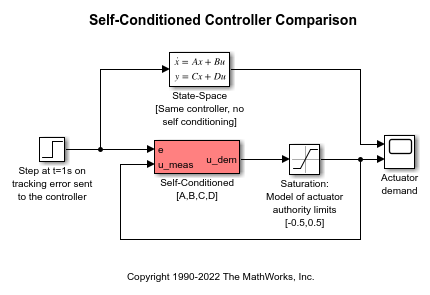
Self-Conditioned Controller Comparison
Compare the implementation of a state-space controller [A,B,C,D] in a self-conditioned form versus a typical state-space controller [A,B,C,D].
Limitations
This block requires the Control System Toolbox license.
Ports
Input
Output
Parameters
More About
State-space controller implemented in both self-conditioned and standard state-space forms.
This Simulink® model shows a state-space controller implemented in both self-conditioned and standard state-space forms. The actuator authority limits of ±0.5 units are modeled by the Saturation block.
Notice that the A-matrix has a zero in the 1,1 element, indicating integral action.
The top trace shows the conventional state-space implementation. The output of the controller winds up well past the actuator upper authority limit of +0.5. The lower trace shows that the self-conditioned form results in an actuator demand that tracks the upper authority limit, which means that when the sign of the control error, e, is reversed, the actuator demand responds immediately.
References
[1] Kautsky, Nichols, and Van Dooren, "Robust Pole Assignment in Linear State Feedback," International Journal of Control, Vol. 41, Number 5, 1985, pp. 1129-1155.
Extended Capabilities
Version History
Introduced before R2006a