csapi
Cubic spline interpolation
Description
Note
For a simpler but less flexible method to interpolate cubic splines, try the Curve Fitter app or the fit function and see About Smoothing Splines.
pp = csapi(x,y)x that takes the values y(:,j) at x(j) for j=1:length(x). The values y(:,j) can be scalars, vectors, matrices, and ND-arrays. The function averages the data points with the same data site and then sorts them by their sites. With x the resulting sorted data sites, the spline s satisfies the not-a-knot end conditions, such as
where D3s is the third derivative of s.
If x is a cell array of sequences x1, ..., xm of lengths n1, ..., nm, then y is an array of size [n1,...,nm] (or of size [d,n1,...,nm] if the interpolant is d-valued). In that case, pp is the ppform of an m-cubic spline interpolant s to such data. In particular,
with and .
To perform operations on this interpolating cubic spline, such as evaluation, differentiation, plotting, use the pp structure. For more information, see the fnval, fnder, fnplt functions.
values = csapi(x,y,xx)xx. This syntax is the same as fnval(csapi(x,y),xx).
This command is essentially the MATLAB® function spline, which, in turn, is a stripped-down version of the Fortran routine CUBSPL in PGS, except that csapi (and now also spline) accepts vector-valued data and can handle gridded data.
Examples
This example shows how to use the csapi command from Curve Fitting Toolbox™ to construct cubic spline interpolants.
Interpolant to Two Points
The command
values = csapi(x,y,xx)
returns the values at xx of the cubic spline interpolant to the given data (x,y), using the not-a-knot end condition. This interpolant is a piecewise cubic function with break sequence x, whose cubic pieces join together to form a function with two continuous derivatives. The "not-a-knot" end condition means that, at the first and last interior break, even the third derivative is continuous (up to round-off error).
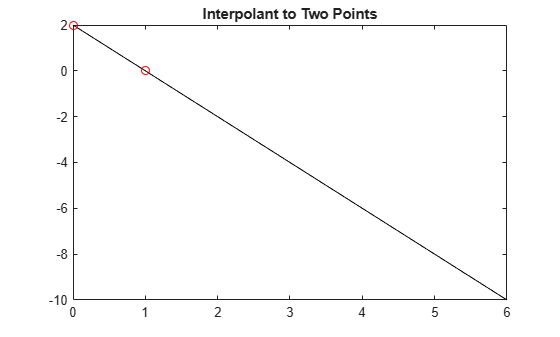
Specifying only two data points results in a straight line interpolant.
x = [0 1]; y = [2 0]; xx = linspace(0,6,121); plot(xx,csapi(x,y,xx),'k-',x,y,'ro') title('Interpolant to Two Points')
Interpolant to Three Points
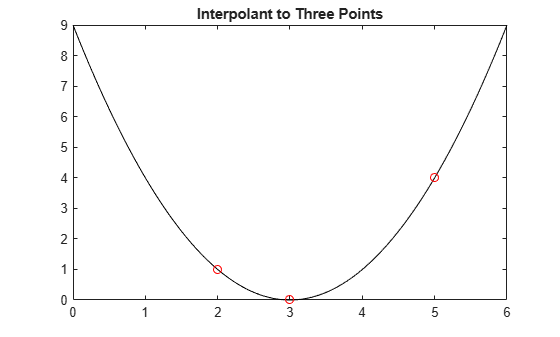
If you specify three data points, the function outputs a parabola.
x = [2 3 5]; y = [1 0 4]; plot(xx,csapi(x,y,xx),'k-',x,y,'ro') title('Interpolant to Three Points')
Interpolant to Five Points
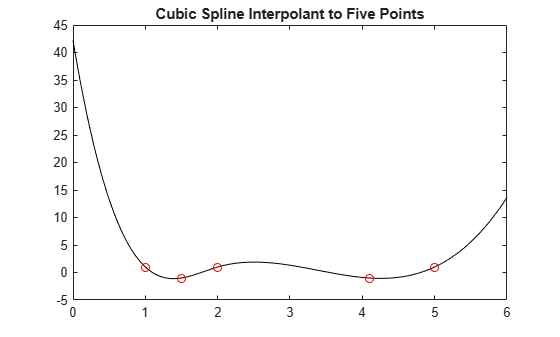
More generally, if you specify four or five data points, the function outputs a cubic spline.
x = [1 1.5 2 4.1 5]; y = [1 -1 1 -1 1]; plot(xx,csapi(x,y,xx),'k-',x,y,'ro') title('Cubic Spline Interpolant to Five Points')
Up to rounding errors, and assuming that x is a vector with at least four entries, the statement pp = csapi``(x,y) puts the same spline into pp as the following statement, except that the description of the spline obtained this second way does not use breaks at x(2) and x(n-1):
pp = fn2fm(spapi(augknt(x([1 3:(end-2) end]),4),x,y),"pp");
As a simple bivariate example, plot a bicubic spline interpolant to a Ricker wavelet.
x =.0001 + (-4:.2:4);
y = -3:.2:3;
[yy,xx] = meshgrid(y,x);
r = pi*sqrt(xx.^2+yy.^2);
z = sin(r)./r;
bcs = csapi({x,y},z);
fnplt(bcs)
axis([-5 5 -5 5 -.5 1])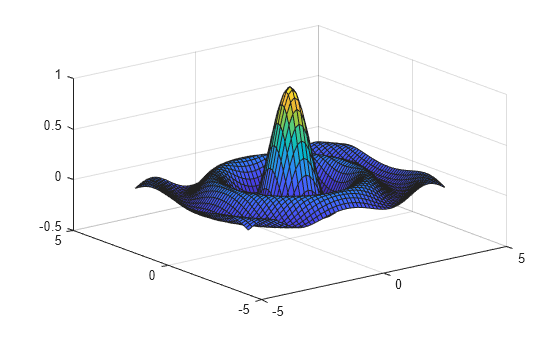
Since MATLAB® considers the entry z(i,j) as the value at (x(j),y(i)), the code reverses x and y in the call to meshgrid. The Curve Fitting Toolbox® instead follows the Approximation Theory standard whereas z(i,j) is the value at (x(i),y(j)).
For this reason, you have to be cautious when you are plotting values of such a bivariate spline with the aid of the MATLAB mesh function, as shown here:
xf = linspace(x(1),x(end),41);
yf = linspace(y(1),y(end),41);
mesh(xf,yf,fnval(bcs,{xf,yf}).')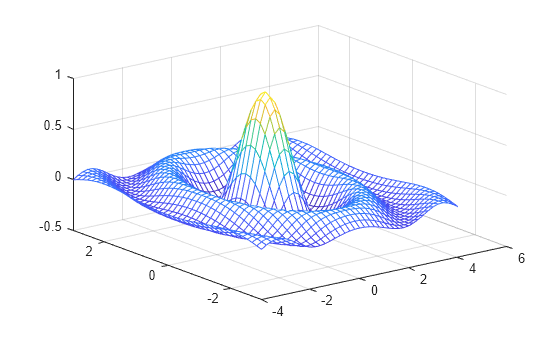
Note the use of the transpose of the matrix of values obtained from fnval.
Input Arguments
Output Arguments
Algorithms
csapi is an implementation of the Fortran routine CUBSPL from PGS.
The algorithm constructs and solves the relevant tridiagonal linear system using the MATLAB sparse matrix capability.
The algorithm also uses the not-a-knot end condition, forcing the first and second polynomial piece of the interpolant to coincide, as well as the second-to-last and the last polynomial piece.
Version History
Introduced in R2006b