Linear Model Identification
Use linear model identification when a linear model is sufficient to completely capture your system dynamics. You can identify linear models in the System Identification app or at the command line. System Identification Toolbox™ enables you to create and estimate four general types of linear model.
Parametric models — Estimate parameters in structures such as transfer function models, linear state-space models, polynomial models, and process models.
Frequency-response models — Estimate spectral models using spectral analysis.
Correlation models — Perform nonparametric estimation of impulse-response models using correlation analysis.
Linear grey-box models — Estimate the coefficients of arbitrary ordinary differential or difference equations, incorporating system information that you obtain from prior knowledge or that you can deduce from physical principles.
Linear model identification requires frequency-domain or uniformly sampled time-domain data. Your data can have one or more input and output channels. For more information, see About Identified Linear Models. You can also model time series data, which contains a single output channel and no input channel, using parametric model structures such as AR and ARMA.
You can use the identified models to simulate and predict model output at the command line, in the app, or in Simulink®.
Categories
- Linear Model Identification Basics
Essential information for identifying linear models, selecting suitable model structures, constructing and modifying model object structures, and using regularized estimation
- Process Models
Low-order transfer function models with static gain, time constant, and input/output delay
- Input-Output Polynomial Models
Input-output polynomial models, including ARX, ARMAX, output-error, and Box-Jenkins model structures
- State-Space Models
State-space models with free, canonical, and structured parameterizations; equivalent ARMAX and output-error (OE) models
- Transfer Function Models
Transfer function models
- Linear Grey-Box Models
Estimate coefficients of linear differential, difference, and state-space equations
- Frequency-Response Models
Frequency-response models obtained using spectral analysis
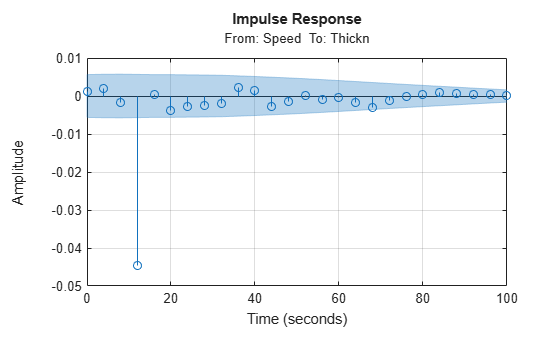
- Correlation Models
Impulse-response models obtained using correlation analysis
Featured Examples
Glass Tube Manufacturing Process
Linear model identification of a glass tube manufacturing process.
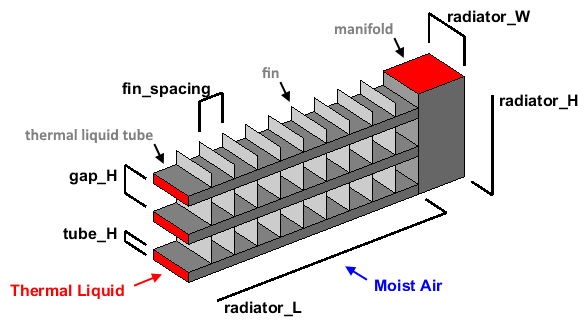
Estimating Transfer Function Models for a Heat Exchanger
Estimate a transfer function from measured signal data.
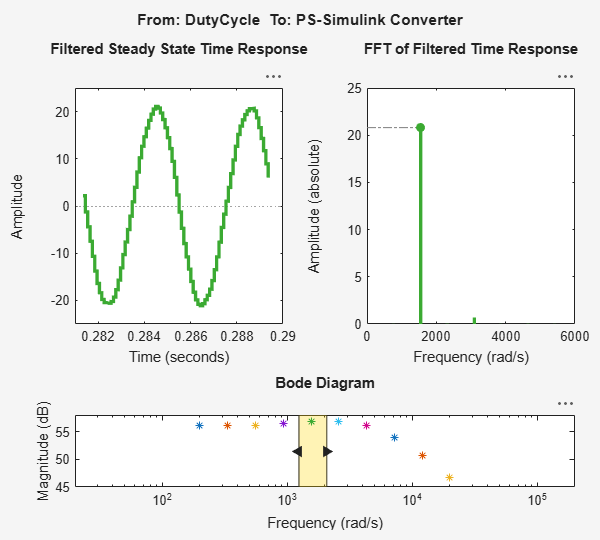
Estimating Transfer Function Models for a Boost Converter
Estimate a transfer function from frequency response data.
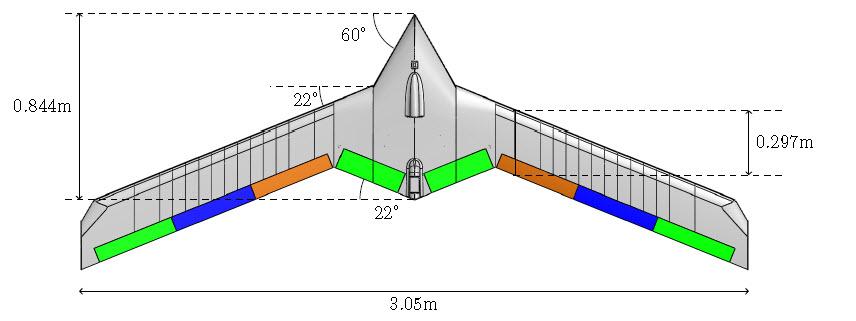
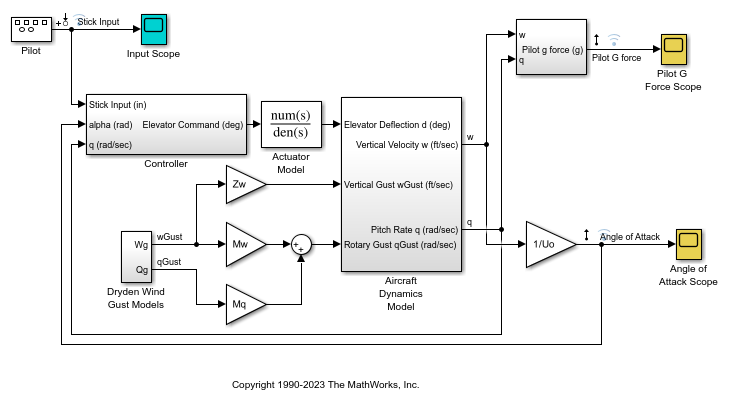
Modal Analysis of a Flexible Flying Wing Aircraft
Computation of bending modes of a flexible wing aircraft.
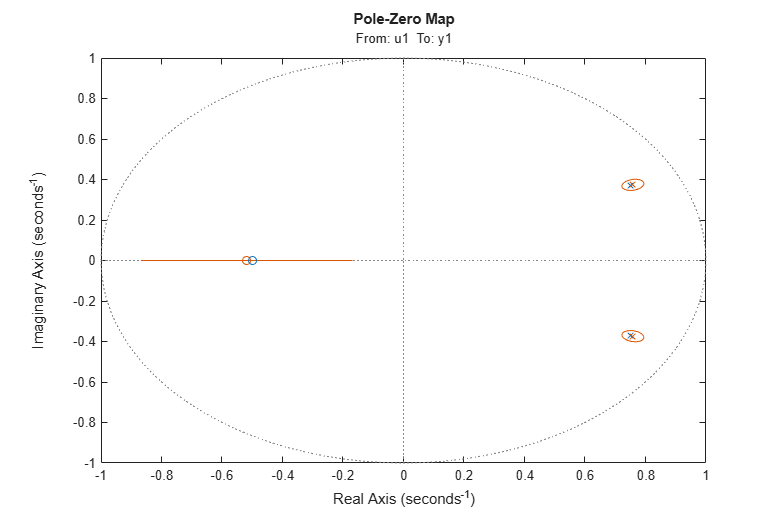
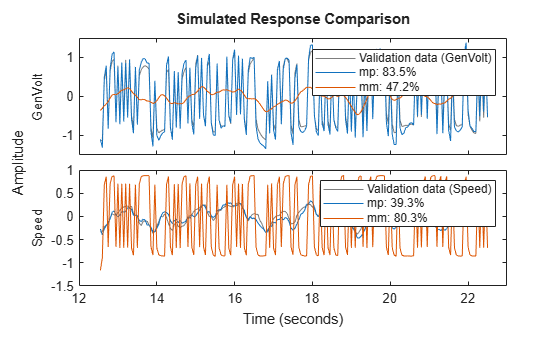
Comparison of Various Model Identification Methods
Several identification methods available in System Identification Toolbox.
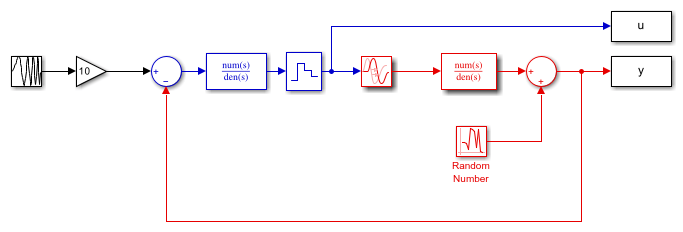
Estimating Continuous-Time Models Using Simulink Data
Illustrates how models simulated in Simulink® can be identified using System Identification Toolbox™. The example describes how to deal with continuous-time systems and delays, as well as the importance of the intersample behavior of the input.
Linear Approximation of Complex Systems by Identification
Obtain linear approximations of a complex, nonlinear system by means of linear model identification.
Analyze Data in Multivariable Systems and Identify Models
Collect MIMO data, estimate and compare models, and view corresponding model responses.
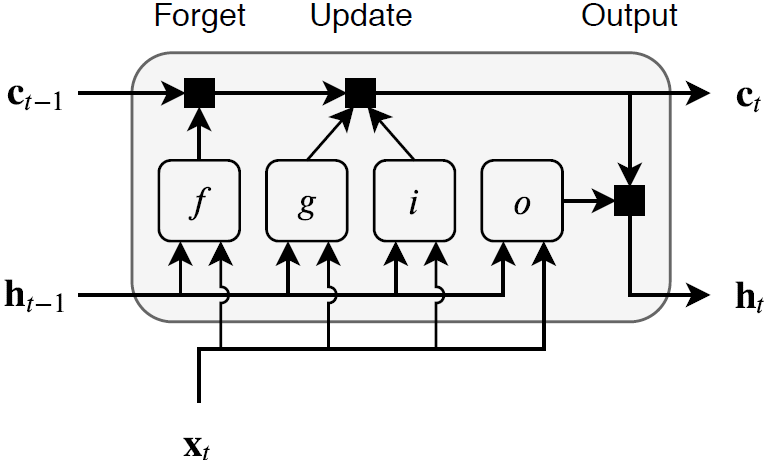
Use LSTM Network for Linear System Identification
Use Long Short-Term Memory (LSTM) neural networks to estimate a linear system and compares this approach to transfer-function estimation.