lidarSensor
Description
The lidarSensor
System object™ simulates a lidar sensor mounted on an ego vehicle and
outputs point cloud data for a given scene. The generated data is with respect to the ego
vehicle coordinate system based on the sensor pose and the actors present in the scene. You
can use the drivingScenario (Automated Driving Toolbox) object to create a scenario
containing actors and trajectories, then generate the point cloud data for the scenario by
using the lidarSensor object.
You can also use the lidarSensor
object with vehicle actors in RoadRunner Scenario simulation. First you must create a SensorSimulation (Automated Driving Toolbox)
object to interface sensors with RoadRunner Scenario and then register the lidar as a sensor model using the addSensors (Automated Driving Toolbox)
object function before simulation. For more information, see Add Lidar Sensor Model with Simulated Weather Effects to RoadRunner Scenario. (since R2024a)
The lidar sensor model created with lidarSensor object uses hardware accelerated ray tracing to produce a highly realistic and accurate representation of objects in the point cloud. Ray tracing allows for precise modeling of the interactions between light rays emitted by the lidar sensor and the surfaces of objects in the scene. Additionally, ray tracing considers factors such as surface texture and angles, which enhances the realism and accuracy of the output point cloud data.
To simulate lidar sensor using this object:
Create the
lidarSensorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
lidar = lidarSensorlidarSensor object with default property values. You can use this
object to generate lidar point cloud data for a given 3-D environment.
lidar = lidarSensor(Name=Value)lidarSensor(UpdateRate=0.2) creates a lidarSensor
object that generates point cloud detections at every 0.2 seconds.
Properties
Usage
Syntax
Description
ptCloud = lidar(time)ptCloud, at the specified simulation
time time. The function generates data at time intervals specified by
the UpdateRate property of the lidarSensor object
lidar.
Note
Use this syntax to generate point cloud data for a drivingScenario (Automated Driving Toolbox) object after adding the lidarSensor
object to the scenario using the addSensors (Automated Driving Toolbox) function. This also updates the
ActorProfiles property of the lidarSensor
object based on the values of the connected scenario.
[
additionally returns ptCloud,isValidTime,clusters] = lidar(tgtPoses,time)isValidTime, which indicates whether the
simulation time is valid, and clusters, which contain the
classification data of the output point cloud.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Load synthetic scene data containing actor profiles and target poses generated using the drivingScenario (Automated Driving Toolbox) object into the workspace.
sceneData = load("scene_data.mat");
sceneActorProfiles = sceneData.ActorProfiles;
sceneTargetPoses = sceneData.TargetPoses;Load the target material reflectance data.
reflectanceData = load("scene_target_reflectances.mat");
targetReflectance = reflectanceData.TargetReflectances;Define the reflectances for each actor.
for i = 1:numel(sceneActorProfiles) sceneActorProfiles(i).MeshTargetReflectances = targetReflectance{i}; end
Create a lidarSensor System object™, and define the actor profiles for the object.
lidarS = lidarSensor(AzimuthResolution=0.5,RainRate=2.5); lidarS.ActorProfiles = sceneActorProfiles;
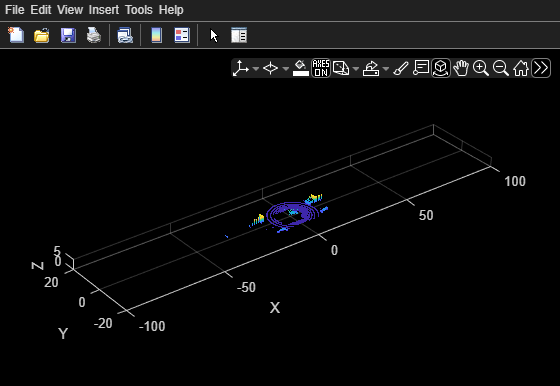
Create a pcplayer object to visualize the lidar sensor point cloud detections.
player = pcplayer([-100 100],[-20 20],[0 5]);
Generate and visualize the point cloud detections at valid simulation times.
for i = 1:5:numel(sceneTargetPoses) if(~player.isOpen) break end [ptCloud,isValid] = lidarS(sceneTargetPoses{i},i*0.1); if(isValid) view(player,ptCloud) end end
References
[1] Tian, Wenxin, Lingli Tang, Yuwei Chen, Ziyang Li, Jiajia Zhu, Changhui Jiang, Peilun Hu, et al. “Analysis and Radiometric Calibration for Backscatter Intensity of Hyperspectral LiDAR Caused by Incident Angle Effect.” Sensors 21, no. 9 (April 23, 2021): 2960. https://doi.org/10.3390/s21092960.
[2] Goodin, Christopher, Daniel Carruth, Matthew Doude, and Christopher Hudson. “Predicting the Influence of Rain on LIDAR in ADAS.” Electronics 8, no. 1 (January 15, 2019): 89. https://doi.org/10.3390/electronics8010089.
Version History
Introduced in R2022aSee Also
Apps
- Lidar Labeler | Point Cloud Analyzer | Lidar Camera Calibrator | Driving Scenario Designer (Automated Driving Toolbox)
Functions
rangeSensor|drivingScenario(Automated Driving Toolbox) |actorProfiles(Automated Driving Toolbox) |actorPoses(Automated Driving Toolbox)
Blocks
- Lidar Sensor | Scenario Reader (Automated Driving Toolbox) | Point Cloud Viewer