Nonlinear Characterization
You can use Motor Control Blockset™ to identify and model motor behaviors that deviate from ideal linear assumptions, such as magnetic saturation, inverter dead time, and cross‑coupling between axes. These effects cause motor parameters like inductance, torque constant, and flux linkage to vary with current, speed, and operating point. Linear models used in basic control design cannot accurately represent these variations over the full operating range. Nonlinear characterization therefore provides a more realistic description of how the motor actually behaves in real‑world conditions.
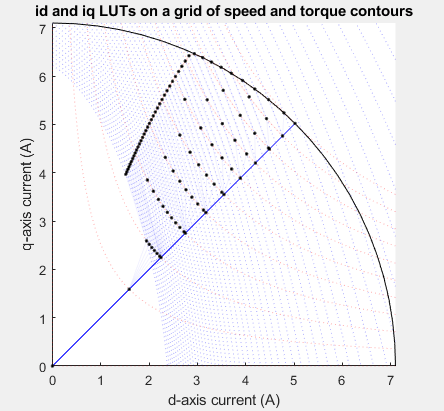
Without accounting for nonlinearities, the controller may suffer from torque errors, reduced efficiency, poor low‑speed performance, or instability at high currents. A lookup table (LUT) is commonly used in non‑linear motor control to store experimentally measured or identified motor parameters — such as flux linkage and inductance — as functions of speed and current, along with computed quantities like optimal reference currents. During operation, the controller accesses the LUT to compensate for non‑linear behavior in real time, enabling more precise torque control, improved efficiency, and robust performance compared to purely linear control methods.
Functions
mcb.generateMotorLUT | Generate lookup tables for motor parameters (Since R2022b) |
mcb.PMSMMaxSpeed | Calculate maximum speed of PMSM (Since R2022b) |
mcb.PMSMRatedTorque | Calculate rated torque of PMSM (Since R2022b) |
mcb.PMSMSpeeds | Calculate milestone speeds of PMSM (Since R2022b) |
mcb.calcPMSMVdVq | Calculate d and q axis voltages from PMSM parameters, operating currents, and electric speed (Since R2022b) |
mcb.updatePMSMLdLqFluxPM | Update PMSM inductance and flux parameters (Since R2022b) |
Blocks
Topics
- Determine Nonlinear Behavior of PMSM Using Characterization Test Data
Build realistic closed-loop simulation of PMSM using characterization test data and obtain nonlinear operating characteristics.
Featured Examples
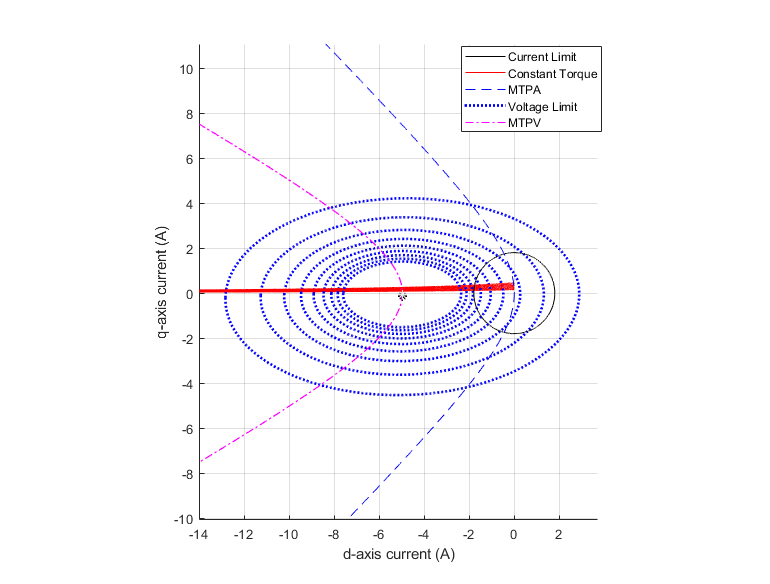
PMSM Drive Characteristics and Constraint Curves
Uses Motor Control Blockset™ to show how to use the PMSM characteristic plotting and PMSM milestone speed identification functions to obtain a control trajectory.
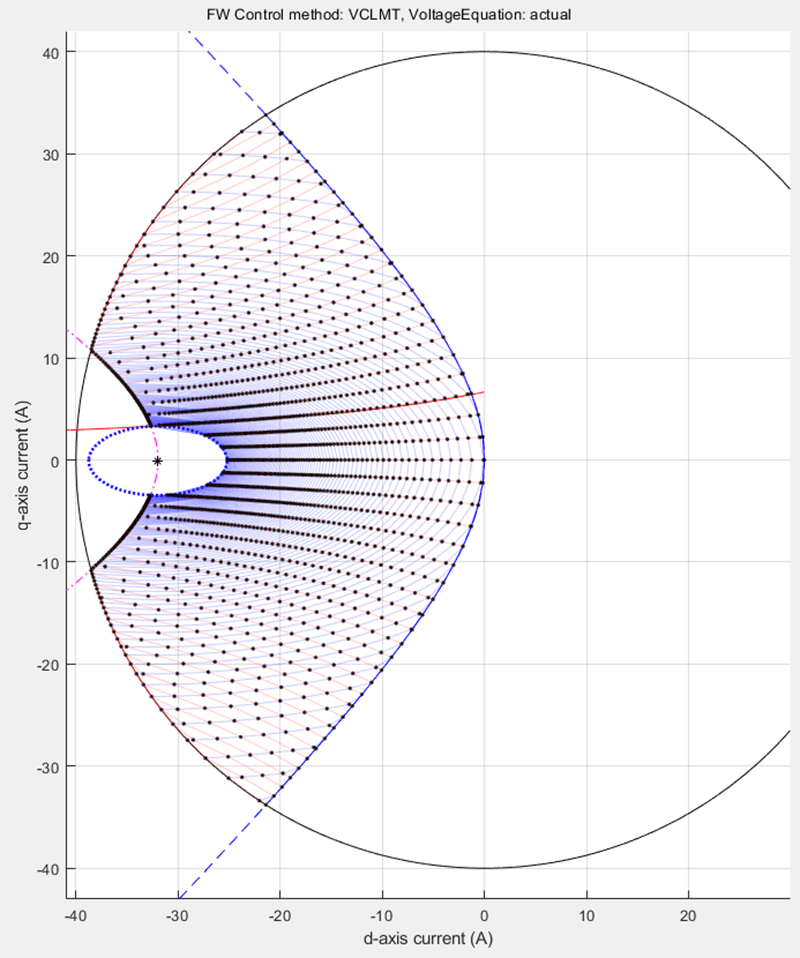
PMSM Constraint Curves and Their Application
Uses Motor Control Blockset™ to explain the fundamentals of constraint curves, utilization of these curves to determine operating currents, and usage of the grid of these currents in simulation or deployment environments.
SynRM Constraint Curves and Their Application
Uses Motor Control Blockset™ to utilize the motor constraint curves to determine the operating currents and use lookup tables of these currents in simulation or deployment environments. The example uses the PMSM constraint curves described in the PMSM Drive Characteristics and Constraint Curves page.
Field-Weakening Control (with MTPA) of Nonlinear PMSM Using Lookup Table
Uses a lookup table (LUT) for a nonlinear permanent magnet synchronous motor (PMSM) and controller to run the motor using field-weakening control (with maximum torque per ampere (MTPA)). Use this example to replicate and run a finite element analysis (FEA) based nonlinear, high-fidelity PMSM in simulation. This example helps motor design engineers to simulate high-performance motors in real-world motor control applications. In addition, control system engineers can use this example to design control algorithms for a given set of motor parameter data to achieve high levels of accuracy in tracking and controlling speed and torque as well as to meet efficiency requirements, especially for high-performance motors.
Field-Weakening Control (with MTPA) of Nonlinear Synchronous Reluctance Motors Using Lookup Table
Uses a lookup table (LUT) for a nonlinear synchronous reluctance motor and controller to run the motor using field-weakening control (with maximum torque per ampere (MTPA)). Use this example to replicate and run a finite element analysis (FEA) based nonlinear, high-fidelity synchronous reluctance motor in simulation. This example helps motor design engineers to simulate high-performance motors in real-world motor control applications. In addition, control system engineers can use this example to design control algorithms for a given set of motor parameter data to achieve high levels of accuracy in tracking and controlling speed and torque as well as to meet efficiency requirements, especially for high-performance motors.