Open-Loop Control
In open-loop V/F control, or Volts-per-Hertz control, a constant ratio is maintained between the applied stator voltage and the supply frequency to keep the motor's air-gap flux at its rated level. By keeping the flux constant, the motor can produce its rated torque across a wide range of operating speeds without saturating the magnetic core or losing efficiency. In practice, the controller adjusts the output frequency of the inverter to set the motor speed, while simultaneously scaling the voltage magnitude according to a predefined linear relationship. For operation at very low frequencies, a voltage boost is typically applied to compensate for the resistive voltage drop in the stator windings and ensure sufficient starting torque.
I-F control provides good control over torque during motor startup. Unlike open-loop control, I-F control starts the motor without any current overshoot as well as provides smooth I-F control to closed-loop control transition.
Blocks
Featured Examples
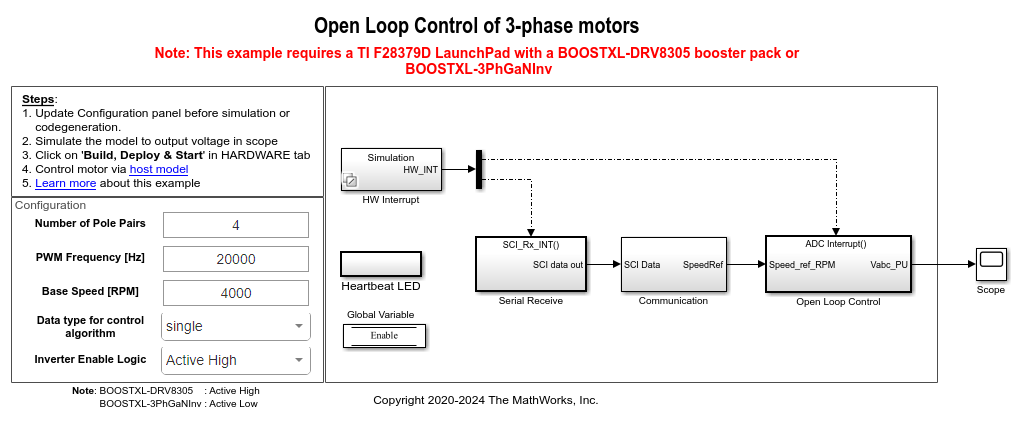
Run 3-Phase AC Motors in Open-Loop Control and Calibrate ADC Offset
Uses open-loop control (also known as scalar control or Volts/Hz control) to run a motor. This technique varies the stator voltage and frequency to control the rotor speed without using any feedback from the motor. You can use this technique to check the integrity of the hardware connections. A constant speed application of open-loop control uses a fixed-frequency motor power supply. An adjustable speed application of open-loop control needs a variable-frequency power supply to control the rotor speed. To ensure a constant stator magnetic flux, keep the supply voltage amplitude proportional to its frequency.

Swap Motors with Single Deployment of Sensorless FOC Algorithm
Run a permanent magnet synchronous motor (PMSM) in an industrial drive application setup using a sensorless field-oriented control (FOC) algorithm. The example uses a sensorless Flux Observer to estimate the motor position. Industrial drives enable you to replace a motor with a new one without repeated deployment of code. An industrial drive setup needs only nameplate parameters to adapt the software to the new motor.
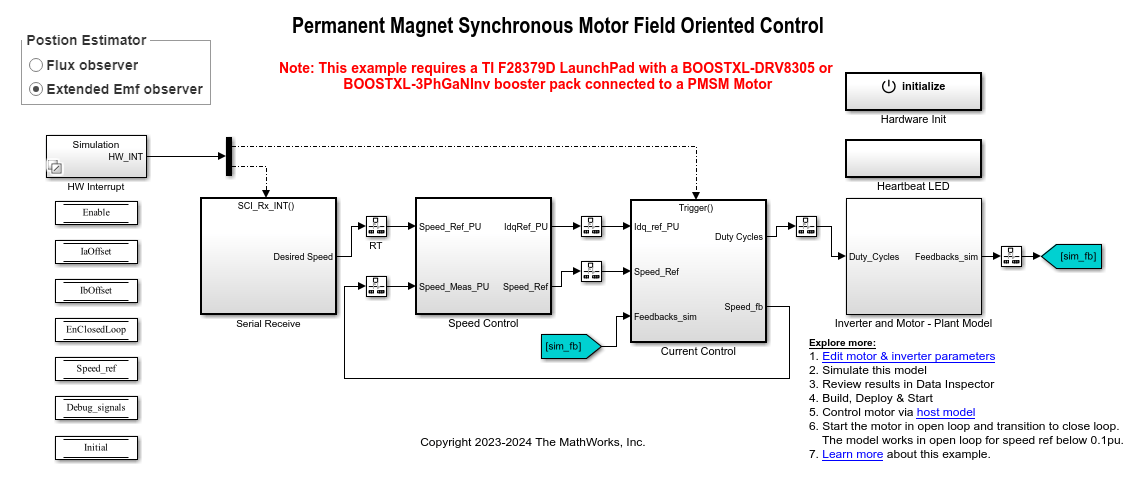
Sensorless Field-Oriented Control of PMSM Using I-F Control-Based Startup
Implements field-oriented control (FOC) using sensorless position estimation and I-F control-based startup to control the speed of a three-phase permanent magnet synchronous motor (PMSM).