linearize
Linear approximation of Simulink model or subsystem
Syntax
Description
linsys = linearize(model,io)model at the model operating point
using the analysis points specified in io. Using
io, you can specify individual analysis points or you
can specify a block or subsystem to linearize. If you omit
io, then linearize uses the
root-level inports and outports of the model as analysis points.
linsys = linearize(___,'StateOrder',stateorder)
Examples
Linearize Model Using Specified I/O Set
Open the Simulink model.
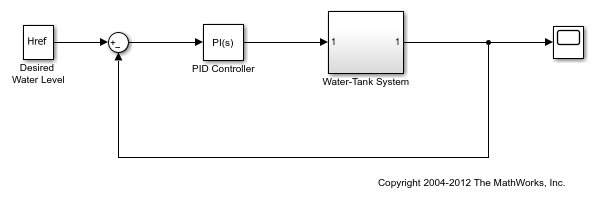
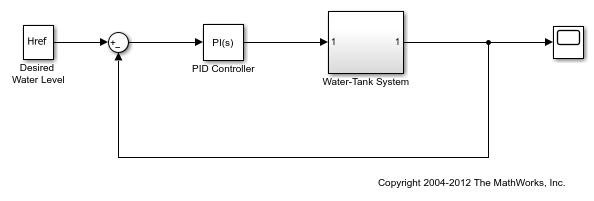
mdl = 'watertank';
open_system(mdl)
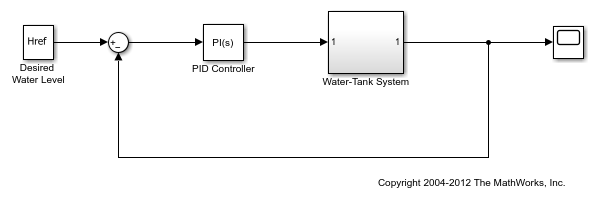
Specify a linearization input at the output of the PID Controller block, which is the input signal for the Water-Tank System block.
io(1) = linio('watertank/PID Controller',1,'input');
Specify a linearization output point at the output of the Water-Tank System block. Specifying the output point as open-loop removes the effects of the feedback signal on the linearization without changing the model operating point.
io(2) = linio('watertank/Water-Tank System',1,'openoutput');
Linearize the model using the specified I/O set.
linsys = linearize(mdl,io);
linsys is the linear approximation of the plant at the model operating point.
Linearize Model at Specified Operating Point
Open the Simulink model.
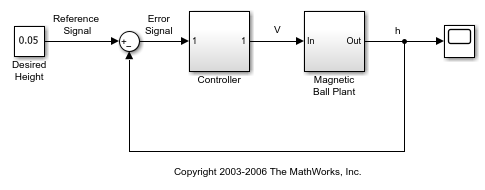
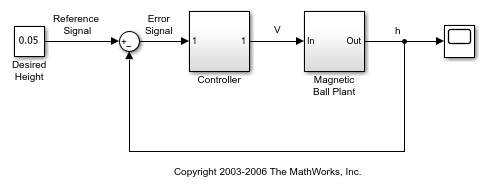
mdl = 'magball';
open_system(mdl)
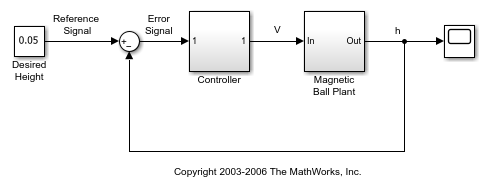
Find a steady-state operating point at which the ball height is 0.05. Create a default operating point specification, and set the height state to a known value.
opspec = operspec(mdl); opspec.States(5).Known = 1; opspec.States(5).x = 0.05;
Trim the model to find the operating point.
options = findopOptions('DisplayReport','off'); op = findop(mdl,opspec,options);
Specify linearization input and output signals to compute the closed-loop transfer function.
io(1) = linio('magball/Desired Height',1,'input'); io(2) = linio('magball/Magnetic Ball Plant',1,'output');
Linearize the model at the specified operating point using the specified I/O set.
linsys = linearize(mdl,io,op);
Linearize Model at Simulation Snapshot Time
Open the Simulink model.
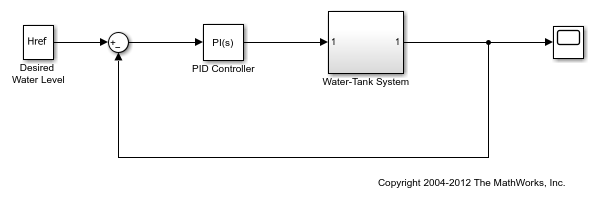
mdl = 'watertank';
open_system(mdl)
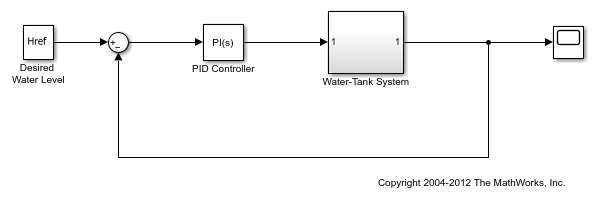
To compute the closed-loop transfer function, first specify the linearization input and output signals.
io(1) = linio('watertank/PID Controller',1,'input'); io(2) = linio('watertank/Water-Tank System',1,'output');
Simulate sys for 10 seconds and linearize the model.
linsys = linearize(mdl,io,10);
Batch Linearize Model for Parameter Variations
Open the Simulink model.
mdl = 'scdcascade';
open_system(mdl)
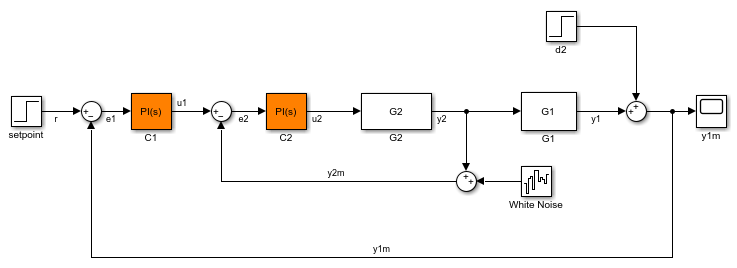
Specify parameter variations for the outer-loop controller gains, Kp1 and Ki1. Create parameter grids for each gain value.
Kp1_range = linspace(Kp1*0.8,Kp1*1.2,6); Ki1_range = linspace(Ki1*0.8,Ki1*1.2,4); [Kp1_grid,Ki1_grid] = ndgrid(Kp1_range,Ki1_range);
Create a parameter value structure with fields Name and Value.
params(1).Name = 'Kp1'; params(1).Value = Kp1_grid; params(2).Name = 'Ki1'; params(2).Value = Ki1_grid;
params is a 6-by-4 parameter value grid, where each grid point corresponds to a unique combination of Kp1 and Ki1 values.
Define linearization input and output points for computing the closed-loop response of the system.
io(1) = linio('scdcascade/setpoint',1,'input'); io(2) = linio('scdcascade/Sum',1,'output');
Linearize the model at the model operating point using the specified parameter values.
linsys = linearize(mdl,io,params);
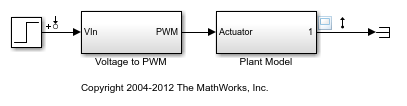
Specify Substitute Block Linearization and Linearize Model
Open the Simulink model.
mdl = 'scdpwm';
open_system(mdl)
Extract linearization input and output from the model.
io = getlinio(mdl);
Linearize the model at the model operating point.
linsys = linearize(mdl,io)
linsys =
D =
Step
Plant Model 0
Static gain.
The discontinuities in the Voltage to PWM block cause the model to linearize to zero. To treat this block as a unit gain during linearization, specify a substitute linearization for this block.
blocksub.Name = 'scdpwm/Voltage to PWM';
blocksub.Value = 1;
Linearize the model using the specified block substitution.
linsys = linearize(mdl,blocksub,io)
linsys =
A =
State Space( State Space(
State Space( 0.9999 -0.0001
State Space( 0.0001 1
B =
Step
State Space( 0.0001
State Space( 5e-09
C =
State Space( State Space(
Plant Model 0 1
D =
Step
Plant Model 0
Sample time: 0.0001 seconds
Discrete-time state-space model.
Specify Sample Time of Linearized Model
Open the Simulink model.
mdl = 'watertank';
open_system(mdl)
To linearize the Water-Tank System block, specify a linearization input and output.
io(1) = linio('watertank/PID Controller',1,'input'); io(2) = linio('watertank/Water-Tank System',1,'openoutput');
Create a linearization option set, and specify the sample time for the linearized model.
options = linearizeOptions('SampleTime',0.1);
Linearize the plant using the specified options.
linsys = linearize(mdl,io,options)
linsys =
A =
H
H 0.995
B =
PID Controll
H 0.02494
C =
H
Water-Tank S 1
D =
PID Controll
Water-Tank S 0
Sample time: 0.1 seconds
Discrete-time state-space model.
The linearized plant is a discrete-time state-space model with a sample time of 0.1.
Linearize Block or Subsystem at Model Operating Point
Open the Simulink model.
mdl = 'watertank';
open_system(mdl)
Specify the full block path for the block you want to linearize.
blockpath = 'watertank/Water-Tank System';
Linearize the specified block at the model operating point.
linsys = linearize(mdl,blockpath);
Linearize Block or Subsystem at Trimmed Operating Point
Open Simulink model.
mdl = 'magball';
open_system(mdl)
Find a steady-state operating point at which the ball height is 0.05. Create a default operating point specification, and set the height state to a known value.
opspec = operspec(mdl); opspec.States(5).Known = 1; opspec.States(5).x = 0.05;
options = findopOptions('DisplayReport','off'); op = findop(mdl,opspec,options);
Specify the block path for the block you want to linearize.
blockpath = 'magball/Magnetic Ball Plant';
Linearize the specified block at the specified operating point.
linsys = linearize(mdl,blockpath,op);
Specify State Order in Linearized Model
Open the Simulink model.
mdl = 'magball';
open_system(mdl)
Linearize the plant at the model operating point.
blockpath = 'magball/Magnetic Ball Plant';
linsys = linearize(mdl,blockpath);
View the default state order for the linearized plant.
linsys.StateName
ans =
3x1 cell array
{'height' }
{'Current'}
{'dhdt' }
Linearize the plant and reorder the states in the linearized model. Set the rate of change of the height as the second state.
stateorder = {'magball/Magnetic Ball Plant/height';...
'magball/Magnetic Ball Plant/dhdt';...
'magball/Magnetic Ball Plant/Current'};
linsys = linearize(mdl,blockpath,'StateOrder',stateorder);
View the new state order.
linsys.StateName
ans =
3x1 cell array
{'height' }
{'dhdt' }
{'Current'}
Linearize Model at Multiple Snapshot Times
Open the Simulink model.
mdl = 'watertank';
open_system(mdl)
To compute the closed-loop transfer function, first specify the linearization input and output signals.
io(1) = linio('watertank/PID Controller',1,'input'); io(2) = linio('watertank/Water-Tank System',1,'output');
Simulate sys and linearize the model at 0 and 10 seconds. Return the operating points that correspond to these snapshot times; that is, the operating points at which the model was linearized.
[linsys,linop] = linearize(mdl,io,[0,10]);
Batch Linearize Plant Model and Obtain Linearization Offsets
Open the Simulink model.
mdl = 'watertank';
open_system(mdl)

Vary parameters A and b within 10% of their nominal values.
[A_grid,b_grid] = ndgrid(linspace(0.9*A,1.1*A,3),...
linspace(0.9*b,1.1*b,4));
Create a parameter structure array, specifying the name and grid points for each parameter.
params(1).Name = 'A'; params(1).Value = A_grid; params(2).Name = 'b'; params(2).Value = b_grid;
Create a default operating point specification for the model.
opspec = operspec(mdl);
Trim the model using the specified operating point specification, parameter grid. Suppress the display of the operating point search report.
opt = findopOptions('DisplayReport','off'); [op,opreport] = findop(mdl,opspec,params,opt);
op is a 3-by-4 array of operating point objects that correspond to the specified parameter grid points.
Specify the block path for the plant model.
blockpath = 'watertank/Desired Water Level';
To store offsets during linearization, create a linearization option set and set StoreOffsets to true.
options = linearizeOptions('StoreOffsets',true);
Batch linearize the plant at the trimmed operating points, using the specified I/O points and parameter variations.
[linsys,linop,info] = linearize(mdl,blockpath,op,params,options);
You can use the offsets in info.Offsets when configuring an LPV System block.
info.Offsets
ans =
3x4 struct array with fields:
x
dx
u
y
StateName
InputName
OutputName
Ts
Input Arguments
Output Arguments
Limitations
Linearization is not supported for model hierarchies that contain referenced models configured to use a local solver.
Linearization is not supported for Simscape™ networks configured to use a local solver.
More About
Algorithms
Alternatives
As an alternative to the linearize function, you can linearize models
using one of the following methods.
To interactively linearize models, use the Model Linearizer app. For an example, see Linearize Simulink Model at Model Operating Point.
To obtain multiple transfer functions without modifying the model or creating an analysis point set for each transfer function, use an
slLinearizerinterface. For an example, see Vary Parameter Values and Obtain Multiple Transfer Functions.
Although both Simulink
Control Design software and the Simulink
linmod function perform block-by-block
linearization, Simulink
Control Design linearization functionality has a more flexible user interface and uses
Control System Toolbox numerical algorithms. For more information, see Linearization Using Simulink Control Design Versus Simulink.
Version History
Introduced in R2006aYou can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)