Outport
Create output port for subsystem or external output
Libraries:
Simulink /
Commonly Used Blocks
Simulink /
Ports & Subsystems
Simulink /
Sinks
HDL Coder /
Commonly Used Blocks
HDL Coder /
Ports & Subsystems
HDL Coder /
Sinks
Description
Outport blocks link signals from a system to a destination outside of the system. They can connect signals flowing from a subsystem to other parts of the model. They can also supply external outputs at the top level of a model hierarchy.
Outport block port numbers are assigned according to these rules:
Outport blocks within a root-level system or subsystem are numbered sequentially, starting with 1.
If you add an Outport block, it is assigned the next available number.
If you delete an Outport block, other port numbers are automatically renumbered to ensure that the Outport blocks are in sequence and that no numbers are omitted.
Outport Blocks in a Subsystem
Outport blocks in a subsystem represent outputs from the subsystem. A signal
arriving at an Outport block in a subsystem flows out of the
associated output port on that Subsystem block. The Outport block
associated with an output port is the block whose Port
number parameter matches the relative position of the output port on
the Subsystem block. For example, the Outport block whose Port number parameter is 1 sends its
signal to the block connected to the topmost output port on the
Subsystem block.
If you renumber the Port number of an Outport block, the block becomes connected to a different output port. The block continues to send the signal to the same block outside the subsystem.
You can directly edit port labels on a Subsystem block. For more information, see Edit Port Labels on Subsystem Blocks.
Tip
For models that include buses composed of many bus elements, consider using In Bus Element and Out Bus Element blocks. These blocks:
Reduce signal line complexity and clutter in a block diagram.
Make it easier to change the interface incrementally.
Allow access to a bus element closer to the point of usage, avoiding the use of a Bus Selector and Goto block configuration.
The In Bus Element block is of block type Inport and the Out Bus Element block is of block type Outport.
Top-Level Outport Block in a Model Hierarchy
Outport blocks at the top level of a model hierarchy have two uses. They can
supply external outputs to the base MATLAB® workspace, and they provide a means for the linmod
and trim analysis functions to obtain output from the
system.
To supply external outputs to the workspace, use the Configuration Parameters > Data Import/Export pane (see Exporting Output Data to
the MATLAB Workspace) or the sim
[t,x,y] = sim(...);
writes y as a matrix, with each column containing data for a
different Outport block. The column order matches the order of the
port numbers for the Outport blocks.
If you specify more than one variable name after the second (state) argument, data
from each Outport block is written to a different variable. For
example, if the system has two Outport blocks, to save data from
Outport block 1 to speed and the data from
Outport block 2 to dist, specify this
command:
[t,x,speed,dist] = sim(...);
Connecting Buses to Root-Level Outports
A root-level Outport block in a model can accept a virtual bus only if all elements of the bus have the same data type. The Outport block automatically unifies the bus to a vector having the same number of elements as the bus, and provides that vector as output.
If you want a root-level Outport block of a model to accept a bus that
contains mixed types, set the Outport block Data
type to Bus: <object name>. If the bus is
virtual, it is converted to nonvirtual, as described in Virtual and Nonvirtual Bus Conversions.
Associate Root-Level Outport Block with Simulink.Signal Object
To associate a root-level Outport block with a
Simulink.Signal object, use the Model Data Editor. See For Signals.
Examples
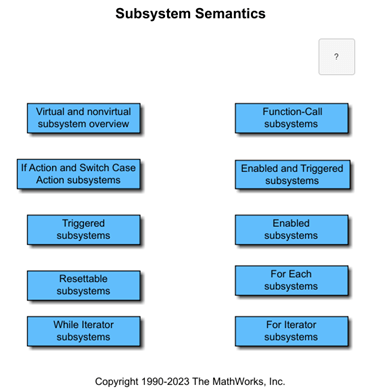
Simulink Subsystem Semantics
This set of examples shows different types of Simulink® Subsystems and what semantics are used when simulating these subsystems. Each example provides a description of the model and the subtleties governing how the model is executed.
Ports
Input
Parameters
Main
Specify the order in which the port that corresponds to the block appears on the parent Subsystem or Model block.
If you add a block that creates another port, the port number is the next available number.
Deleting all blocks associated with a port deletes the port. Other ports are renumbered so that they are sequential and do not skip any numbers.
Specifying a port number that exceeds the number of ports creates a port for that number and for any skipped sequential numbers.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | Port |
| Values: | "1" (default) | real integer in quotes |
| Data Types: | char | string |
Example: set_param("mymodel/Subsystem1/PortBlock",Port="5")
Specify the name of the corresponding signal data in the generated code. Use this parameter to specify a name for the signal data when you apply a storage class to a root-level Outport block.
Dependencies
To enable this parameter, the block must be at the top level of a model.
Programmatic Use
Block Parameter:
SignalName |
| Type: character vector |
| Values: character vector |
Default:
' ' |
Specify the information displayed on the block icon.
Programmatic Use
Block Parameter:
IconDisplay
|
| Type: character vector |
Values:
'Signal name' | 'Port number' |
'Port number and signal name' |
Default:
'Port number'
|
Specify a constant output value for when source is not connected.
Dependencies
Available for unconnected Outport blocks inside a Variant Subsystem block.
Programmatic Use
Block Parameter:
OutputWhenUnconnected
|
| Type: character vector |
Values:
'on' | 'off' |
Default:
'off'
|
Specify a constant output value for when source is not connected.
Dependencies
Available in a Variant Subsystem block for an unconnected Outport block with Specify output when source is unconnected selected.
Programmatic Use
Block Parameter:
OutputWhenUnconnectedValue |
| Type: character vector |
Values:
scalar | vector |
Default:
'0' |
Select this check box to create a vector of length N at the output if
the Constant value parameter evaluates
to an N-element row or column vector.
Dependencies
Available in a Variant Subsystem block on an unconnected Outport block when you select the Specify output when source is unconnected parameter.
Programmatic Use
Block Parameter:
VectorParamsAs1DForOutWhenUnconnected
|
| Type: character vector |
Values:
'on' | 'off' |
Default:
'on'
|
Clear this parameter to allow Simulink® to use a signal buffer on output port. This buffer, which is the equivalent of a Signal Conversion block but is not displayed on the canvas, ensures consistent initialization of the Outport block signal.
If you select this parameter, Simulink tries to remove the signal buffer.
If the signal buffer is not needed, Simulink removes the buffer.
If the signal buffer is needed for data consistency and proper execution, Simulink displays an error indicating the buffer could not be removed.
Allow partial writes through Assignment blocks.
For more information regarding this parameter, including examples with conditional writes and partial writes, see Ensure Output Port Is Virtual.
Note
The block is always virtual if it is at the root-level of a model and is driven by another Outport block inside an Initialize Function block, a Reset Function block, a Reinitialize Function block or a Terminate Function block.
Dependencies
This parameter applies to these blocks and this configuration parameter setting:
Conditional subsystem
Assignment
Merge
Model with root Outport block
The Underspecified initialization detection configuration parameter must be set to
Simplified. This block parameter is not available when theClassicoption of the configuration parameter is selected. For more information about how to switch from classic to simplified initialization mode, see Convert from Classic to Simplified Initialization Mode.
Programmatic Use
Block Parameter:
EnsureOutportIsVirtual
|
| Type: character vector |
Values:
'on' | 'off' |
Default:
'off'
|
Specify what happens to the block output when the subsystem is
disabled. Select held to indicate that the
output is held when the subsystem is disabled. Select
reset to indicate that the output is
reset to the value given by Initial output when the
subsystem is disabled.
Dependencies
Available when an Outport block is inside a conditional subsystem with valid enabling and disabling semantics. For example, the parameter is available for an Outport block inside an Enabled Subsystem block and not for an Outport block inside a Triggered Subsystem block.
If an Outport block is inside a Function-Call Subsystem block, this parameter is only meaningful if the Function-Call Subsystem block is connected to a state in a Stateflow® chart. For more information, see Control Function-Call Subsystems (Stateflow).
When connecting the output of a conditional subsystem to a Merge block, set
this parameter to held. Setting it to
reset returns an error.
Programmatic Use
Block Parameter:
OutputWhenDisabled
|
| Type: character vector |
Values:
'held' | 'reset' |
Default:
'held'
|
For conditionally executed subsystems, specify the block output before the subsystem executes and while it is disabled. To inherit the initial output value from the input signal, apply both of these default settings:
Set Initial output parameter to
[].Set Output when disabled parameter to
held.
Simulink attempts to inherit the output value from the input
signal. However, if the input signal is not a valid source for the
initial output value, the initial output value [] is
treated as double(0). For more information, see Conditional Subsystem Initial Output Values.
For information about specifying an initial condition structure, see Specify Initial Conditions for Bus Elements.
Tips
If the conditional subsystem is driving a Merge block, you do not need to specify an Initial Condition (IC) for the Outport block. For more information, see Underspecified initialization detection.
Dependencies
Available when an Outport block is inside a conditional subsystem.
Limitations
This block does not allow an initial output of
inforNaN.When the input is a virtual bus, an Initial output value
[]is treated asdouble(0).When the input contains a nonvirtual bus, Initial output does not support nonzero scalar values.
Programmatic Use
Block Parameter:
InitialOutput
|
| Type: character vector |
Values:
'[]' | scalar | structure |
Default:
'[]' |
Signal Attributes
Lower value of the output range that the software checks.
This number must be a finite real double scalar value.
The software uses this value to perform:
Simulation range checking (see Specify Signal Ranges).
Automatic scaling of fixed-point data types.
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes such as SIL or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Dependencies
The software ignores the value of this parameter when Data type
specifies a Simulink.ValueType or Simulink.Bus object. The
software uses the minimum values specified by the Simulink.ValueType object
or the Simulink.BusElement objects in the Simulink.Bus
object instead.
Programmatic Use
Block Parameter:
OutMin |
| Type: character vector |
Values: '[ ]'|
scalar |
Default: '[ ]' |
Upper value of the output range that the software checks.
This number must be a finite real double scalar value.
The software uses this value to perform:
Simulation range checking (see Specify Signal Ranges).
Automatic scaling of fixed-point data types.
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes such as SIL or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Dependencies
The software ignores the value of this parameter when Data type
specifies a Simulink.ValueType or Simulink.Bus object. The
software uses the maximum values specified by the Simulink.ValueType object
or the Simulink.BusElement objects in the Simulink.Bus
object instead.
Programmatic Use
Block Parameter:
OutMax |
| Type: character vector |
Values: '[ ]'|
scalar |
Default: '[ ]' |
Specify the output data type of the external input. The type can be
inherited, specified directly, or expressed as a data type object such
as a Simulink.NumericType object.
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
You can specify any of these options:
Inherited data type
Built-in Simulink data type — For example, specify
singleoruint8. See Data Types Supported by Simulink.Fixed-point data type — Use the
fixdtfunction. For example, specifyfixdt(1,16,0).Enumerated data type — Use the name of the type preceded by
Enum:. For example, specifyEnum: myEnumType.Bus data type — Use the name of the
Simulink.Busobject preceded byBus:. For example, specifyBus: myBusObject.Simulink image data type — If you have Computer Vision Toolbox™, use the constructor for the
Simulink.ImageType(Computer Vision Toolbox) object and specify the properties to describe the image. By default, the data type uses theSimulink.ImageType(480,640,3)expression that represents the rows, columns, and channels of the image respectively.Value type — Use the name of the
Simulink.ValueTypeobject preceded byValueType:. For example, specifyValueType: windVelocity.Custom data type — Use a MATLAB expression that specifies the type. For example, you can specify a
Simulink.NumericTypeobject whoseDataTypeModeproperty is set to a value other than'Fixed-point: unspecified scaling'.
When you specify a Simulink.ValueType or
Simulink.Bus object as the data type, some parameters of the
Outport block are ignored. For example, the Min,
Max, and Unit parameters of the
Outport block are ignored. The software uses the corresponding properties of
the Simulink.ValueType object or the Simulink.BusElement objects
in the Simulink.Bus object instead. For example, suppose a block sets
Unit to ft/s. When the Data type of
the block specifies a ValueType object that has m/s as its
unit, the block uses m/s instead of ft/s.
Programmatic Use
Block Parameter:
OutDataTypeStr |
| Type: character vector |
Values: 'Inherit:
auto' | 'double' |
'single' | 'half' |
'int8' | 'uint8' |
'int16' | 'uint16' |
'int32' | 'uint32' |
'int64' | 'uint64' |
'boolean' |
'fixdt(1,16)' |
'fixdt(1,16,0)' |
'fixdt(1,16,2^0,0)' |
'string' | 'Enum: <class
name>' | 'Bus: <object
name>' | 'ValueType: <object
name>' | '<data type
expression>' |
Simulink.ImageType(480,640,3) |
Default: 'Inherit:
auto' |
Select this parameter to prevent the fixed-point tools from overriding the output data type you specify on the block. For more information, see Use Lock Output Data Type Setting (Fixed-Point Designer).
Dependencies
The software ignores the value of this parameter when Data type
specifies a Simulink.ValueType object.
Programmatic Use
Block Parameter:
LockScale |
Values: 'off' |
'on' |
Default: 'off' |
Specify the outport bus to be nonvirtual in the parent model. Select this parameter if you want the bus emerging in the parent model to be nonvirtual. The bus that is input to the port can be virtual or nonvirtual, regardless of the setting of Output as nonvirtual bus in parent model.
Clear this parameter if you want the bus emerging in the parent model to be virtual.
Tips
In a nonvirtual bus, all signals must have the same sample time, even if the elements of the associated bus object specify inherited sample times. Any operation that would result in a nonvirtual bus that violates this requirement generates an error. For details, see Modify Sample Times for Nonvirtual Buses.
To use a multirate signal for a virtual bus, in the root-level Outport block, set the Sample time parameter to inherited (
-1).For the top model in a model reference hierarchy, code generation creates a C structure to represent the bus output of this block.
For referenced models, select this option to create a C structure. Otherwise, code generation creates an argument for each leaf element of the bus.
Dependencies
To enable this parameter, Data type must resolve to a
Simulink.Bus object. For example, set Data
type to a Simulink.Bus object or a
Simulink.ValueType object that specifies a
Simulink.Bus object as its data type.
Programmatic Use
Block Parameter:
BusOutputAsStruct |
| Type: character vector |
Values: 'off' |
'on' |
Default: 'off' |
Specify the physical unit of the input signal to the block. To specify a unit, begin
typing in the text box. As you type, the parameter displays potential matching units.
For a list of supported units, use the showunitslist function.
To constrain the unit system, click the link to the right of the parameter:
If a Unit System Configuration block exists in the component, its dialog box opens. Use that dialog box to specify allowed and disallowed unit systems for the component.
If a Unit System Configuration block does not exist in the component, the model Configuration Parameters dialog box displays. Use that dialog box to specify allowed and disallowed unit systems for the model.
Dependencies
The software ignores the value of this parameter when Data type
specifies a Simulink.ValueType or Simulink.Bus object. The
software uses the units specified by the Simulink.ValueType object or the
Simulink.BusElement objects in the Simulink.Bus object
instead.
Programmatic Use
Block Parameter:
Unit
|
| Type: character vector |
Values:
'inherit' | '<Enter unit>'
|
Default:
'inherit'
|
To specify the physical unit of the input signal to the block
without propagation, use UnitNoProp.
Specify the dimensions that a signal must have to be connected to this Outport block.
| A signal of any dimensions can be connected to this port. |
| The signal connected to this port must be a vector of size
|
| The signal connected to this port must be a matrix having
|
Dependencies
The software ignores the value of this parameter when Data
type specifies a Simulink.ValueType object. The
software uses the dimensions specified by the Simulink.ValueType
object instead.
Programmatic Use
Block Parameter:
PortDimensions |
| Type: character vector |
Values: '-1' | integer |
[integer, integer] |
Default: '-1' |
Specify the type of signals allowed at the output of this port. To allow
variable-size and fixed-size signals, select Inherit. To
allow only variable-size signals, select Yes. To allow only
fixed-size signals, select No.
When the signal at this port is a variable-size signal, the Port dimensions parameter specifies the maximum dimensions of the signal.
Dependencies
The software ignores the value of this parameter when Data
type specifies a Simulink.ValueType object. The
software uses the dimensions mode specified by the
Simulink.ValueType object instead.
Programmatic Use
Parameter:
VarSizeSig
|
| Type: character vector |
Value:
'Inherit' | 'No' | 'Yes'
|
Default:
'Inherit'
|
Specify the numeric type of the signal output. To choose the numeric type of the
signal that is connected to its input, select auto.
Otherwise, choose a real or complex signal type.
Dependencies
The software ignores the value of this parameter when Data
type specifies a Simulink.ValueType or
Simulink.Bus object. The software uses the complexity specified
by the Simulink.ValueType object or the
Simulink.BusElement objects in the Simulink.Bus
object instead.
Programmatic Use
Block Parameter:
SignalType |
| Type: character vector |
Values:
'auto' | 'real' |
'complex' |
Default:
'auto' |
Execution
Specify the discrete interval between sample time hits or specify another type of
sample time, such as continuous (0) or inherited
(-1). For more options, see Types of Sample Time.
By default, the block inherits its sample time based upon the context of the block within the model.
Programmatic Use
Block Parameter:
SampleTime |
| Type: character vector |
| Values: scalar |
Default:
'-1' |
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|