estimateEssentialMatrix
Estimate essential matrix from corresponding points in a pair of images
Syntax
Description
E = estimateEssentialMatrix(matchedPoints1,matchedPoints2,intrinsics)E, using the M-estimator sample
consensus (MSAC) algorithm. The input points can be M-by-2 matrices of
M number of [x,y] coordinates, or a
KAZEPoints , SIFTPoints,SURFPoints, MSERRegions, BRISKPoints, or cornerPoints object. The
instinsics object contains the intrinsic parameters of the camera used to
take the images.
E = estimateEssentialMatrix(matchedPoints1,matchedPoints2,intrinsics1,intrinsics2)intrinsics1 and intrinsics2 are cameraIntrinsics objects containing the intrinsic parameters of camera 1 and camera
2 respectively.
[
additionally returns an M-by-1 logical vector,
E,inliersIndex]
= estimateEssentialMatrix(___)inliersIndex, used to compute the essential matrix. The function sets the
elements of the vector to true when the corresponding point was used to
compute the fundamental matrix. The elements are set to false if they are
not used.
[
additionally returns a status code to indicate the validity of points.E,inliersIndex,status]
= estimateEssentialMatrix(___)
[___]
= estimateEssentialMatrix(___, specifies
options using one or more name-value arguments in addition to any combination of arguments from
previous syntaxes. For example, Name=Value)(MaxNumTrials=500) sets the maximum number
of random trials for finding outliers to 500.
Examples
Load a MAT file containing precomputed camera parameters into the workspace.
load upToScaleReconstructionCameraParameters.matRead and undistort two images.
imageDir = fullfile(toolboxdir("vision"),"visiondata","upToScaleReconstructionImages"); images = imageDatastore(imageDir); I1 = undistortImage(readimage(images,1),cameraParams); I2 = undistortImage(readimage(images,2),cameraParams); I1gray = im2gray(I1); I2gray = im2gray(I2);
Detect feature points each image.
imagePoints1 = detectSIFTFeatures(I1gray); imagePoints2 = detectSIFTFeatures(I2gray);
Extract feature descriptors from each image.
[features1, imagePoints1] = extractFeatures(I1gray,imagePoints1); [features2, imagePoints2] = extractFeatures(I2gray,imagePoints2);
Match features across the images.
indexPairs = matchFeatures(features1,features2,MatchThreshold=10,Unique=true);
matchedPoints1 = imagePoints1(indexPairs(:,1));
matchedPoints2 = imagePoints2(indexPairs(:,2));
figure
showMatchedFeatures(I1,I2,matchedPoints1,matchedPoints2);
title("Putative Matches")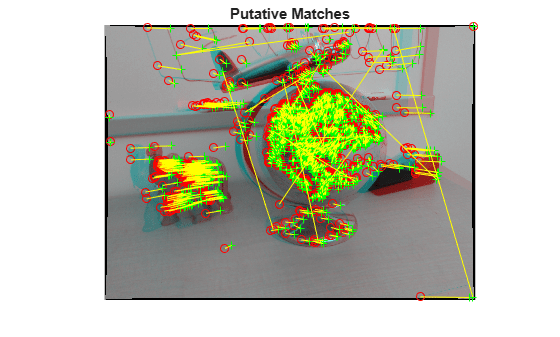
Estimate the essential matrix.
[E,inliers] = estimateEssentialMatrix(matchedPoints1,matchedPoints2,cameraParams);
Display the inlier matches.
inlierPoints1 = matchedPoints1(inliers);
inlierPoints2 = matchedPoints2(inliers);
figure
showMatchedFeatures(I1,I2,inlierPoints1,inlierPoints2);
title("Inlier Matches")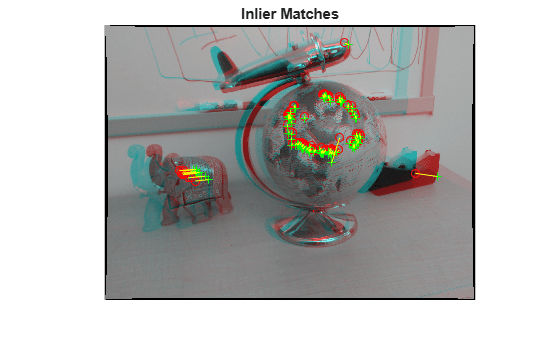
Input Arguments
Name-Value Arguments
Output Arguments
Tips
Use estimateEssentialMatrix when you know
the camera intrinsics. You can obtain the intrinsics using the Camera Calibrator app. Otherwise,
you can use the estimateFundamentalMatrix function
that does not require camera intrinsics. The fundamental matrix cannot
be estimated from coplanar world points.
References
[1] Kukelova, Z., M. Bujnak, and T. Pajdla Polynomial Eigenvalue Solutions to the 5-pt and 6-pt Relative Pose Problems. Leeds, UK: BMVC, 2008.
[2] Nister, D.. “An Efficient Solution to the Five-Point Relative Pose Problem.” IEEE Transactions on Pattern Analysis and Machine Intelligence.Volume 26, Issue 6, June 2004.
[3] Torr, P. H. S., and A. Zisserman. “MLESAC: A New Robust Estimator with Application to Estimating Image Geometry.” Computer Vision and Image Understanding. Volume 78, Issue 1, April 2000, pp. 138-156.