triangulate
3-D locations of undistorted matching points in stereo images
Syntax
Description
worldPoints = triangulate(matchedPoints1,matchedPoints2,stereoParams)
worldPoints = triangulate(matchedPoints1,matchedPoints2,camProjection1,camProjection2)
[
additionally returns reprojection errors for the world points using any of the input
arguments from previous syntaxes.worldPoints,reprojectionErrors]
= triangulate(___)
[
additionally returns the indices of valid and invalid world points. Valid points
are located in front of the cameras.worldPoints,reprojectionErrors,validIndex]
= triangulate(___)
Examples
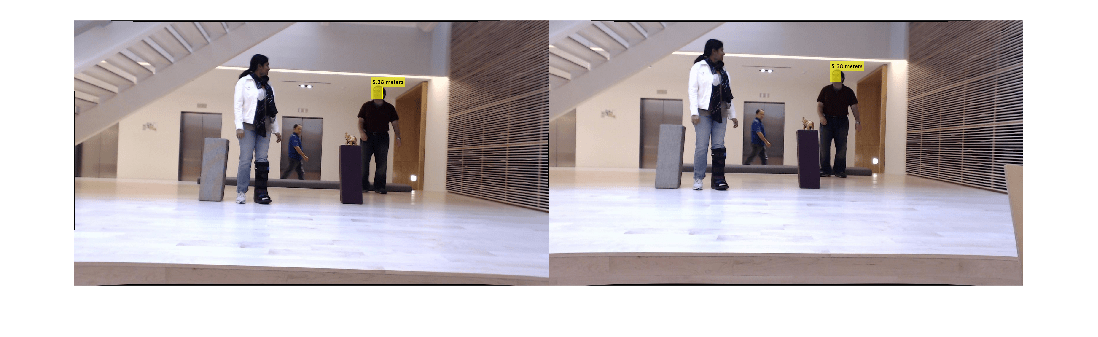
Estimate the real-world distance to a face in an image by applying triangulation techniques to stereo-camera data.
Load stereo parameters.
load('webcamsSceneReconstruction.mat');Read in the stereo pair of images.
I1 = imread('sceneReconstructionLeft.jpg'); I2 = imread('sceneReconstructionRight.jpg');
Undistort the images.
I1 = undistortImage(I1,stereoParams.CameraParameters1); I2 = undistortImage(I2,stereoParams.CameraParameters2);
Detect a face in both images.
faceDetector = vision.CascadeObjectDetector; face1 = faceDetector(I1); face2 = faceDetector(I2);
Find the center of the face.
center1 = face1(1:2) + face1(3:4)/2; center2 = face2(1:2) + face2(3:4)/2;
Compute the distance from camera 1 to the face.
point3d = triangulate(center1, center2, stereoParams); distanceInMeters = norm(point3d)/1000;
Display the detected face and distance.
distanceAsString = sprintf('%0.2f meters', distanceInMeters); I1 = insertObjectAnnotation(I1,'rectangle',face1,distanceAsString,'FontSize',18); I2 = insertObjectAnnotation(I2,'rectangle',face2, distanceAsString,'FontSize',18); I1 = insertShape(I1,'filled-rectangle',face1); I2 = insertShape(I2,'filled-rectangle',face2); imshowpair(I1, I2, 'montage');
Input Arguments
Coordinates of corresponding points in image one, specified as an M-by-2 matrix of M number of [x y] coordinates, or as one of the point feature objects described in Point Feature Types.
Coordinates of corresponding points in image one, specified as an M-by-2 matrix of M number of [x y] coordinates, or as one of the point feature objects described in Point Feature Types.
Camera parameters for stereo system, specified as a stereoParameters object. The
object contains the intrinsic, extrinsic, and lens distortion parameters of
the stereo camera system. You can use the estimateCameraParameters
function to estimate camera parameters and return a
stereoParameters object.
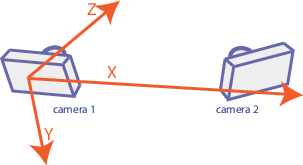
When you pass a stereoParameters object to the function, the origin of the
world coordinate system is located at the optical center of camera 1. The
x-axis points to the right, the
y-axis points down, and the z-axis
points away from the camera.
Projection matrix for camera 1, specified as a 3-by-4 matrix. The matrix
maps a 3-D point in homogeneous coordinates onto the corresponding point in
the image from the camera. This input describes the location and orientation
of camera 1 in the world coordinate system.
camProjection1 must be a real and nonsparse numeric
matrix. You can obtain the camera matrix using the cameraProjection function.
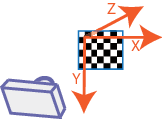
Camera projection matrices, passed to the function, define the world coordinate system.
Projection matrix for camera 2, specified as a 3-by-4 matrix. The matrix
maps a 3-D point in homogeneous coordinates onto the corresponding point in
the image from the camera. This input describes the location and orientation
of camera 2 in the world coordinate system.
camProjection2 must be a real and nonsparse numeric
matrix. You can obtain the camera matrix using the cameraProjection function.
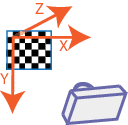
Camera projection matrices, passed to the function, define the world coordinate system.
Output Arguments
3-D locations of matching pairs of undistorted image points, returned as an M-by-3 matrix. The matrix contains M number of [x y z] locations of matching pairs of undistorted image points from two stereo images.
When you specify the camera geometry using stereoParams, the world point
coordinates are relative to the optical center of camera 1.
When you specify the camera geometry using camProjection1 and
camProjection2, the world point coordinates are
defined by the camera matrices.
The function returns worldPoints as data type double
when matchedPoints1 and
matchedPoints2 are of data type
double. Otherwise, the function returns
worldPoints as data type
single.
Data Types: single | double
Reprojection errors, returned as an M-by-1 vector. The function projects
each world point back into both images. Then, in each image, the function
calculates the reprojection error as the distance between the detected and
the reprojected point. The reprojectionErrors vector
contains the average reprojection error for each world point.

Validity of world points, returned as an M-by-1 logical
vector. Valid points, denoted as a logical 1
(true), are located in front of the cameras. Invalid
points, denoted as a logical 0
(false), are located behind the cameras.
The validity of a world point with respect to the position of a camera is determined by projecting the world point onto the image using the camera matrix and homogeneous coordinates. The world point is valid if the resulting scale factor is positive.
Tips
The triangulate function does not account
for lens distortion. You can undistort the images using the undistortImage function before detecting
the points. Alternatively, you can undistort the points themselves
using the undistortPoints function.
References
[1] Hartley, Richard, and Andrew Zisserman. Multiple View Geometry in Computer Vision. 2nd ed., 312-313. Cambridge, UK ; New York: Cambridge University Press, 2003.
Extended Capabilities
Version History
Introduced in R2014bSee Also
Apps
Functions
triangulateMultiview|reconstructScene|estimateCameraParameters|cameraProjection|undistortImage|undistortPoints|estrelpose