undistortPoints
Correct point coordinates for lens distortion
Syntax
Description
undistortedPoints = undistortPoints(points,cameraParams)
[
additionally returns the errors used to evaluate the accuracy of undistorted
points.undistortedPoints,reprojectionErrors]
= undistortPoints(points,cameraParams)
Examples
Create an imageDatastore object containing calibration images.
images = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","mono")); imageFileNames = images.Files;
Detect the calibration pattern.
[imagePoints,patternDims] = detectCheckerboardPoints(imageFileNames);
Generate world coordinates of the corners of the squares. The square size is in millimeters.
squareSize = 29; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
Calibrate the camera.
I = readimage(images,10); imageSize = [size(I, 1), size(I, 2)]; params = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize); intrinsics = params.Intrinsics;
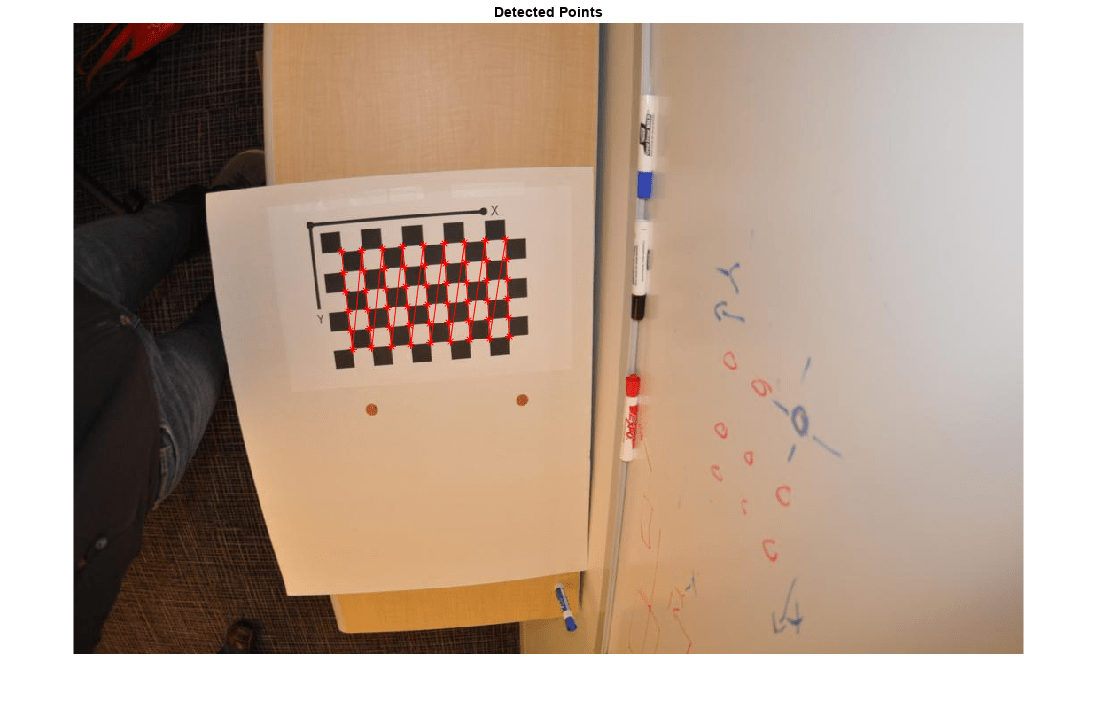
Load an image and detect the checkerboard points.
points = detectCheckerboardPoints(I);
Undistort the points
undistortedPoints = undistortPoints(points,intrinsics);
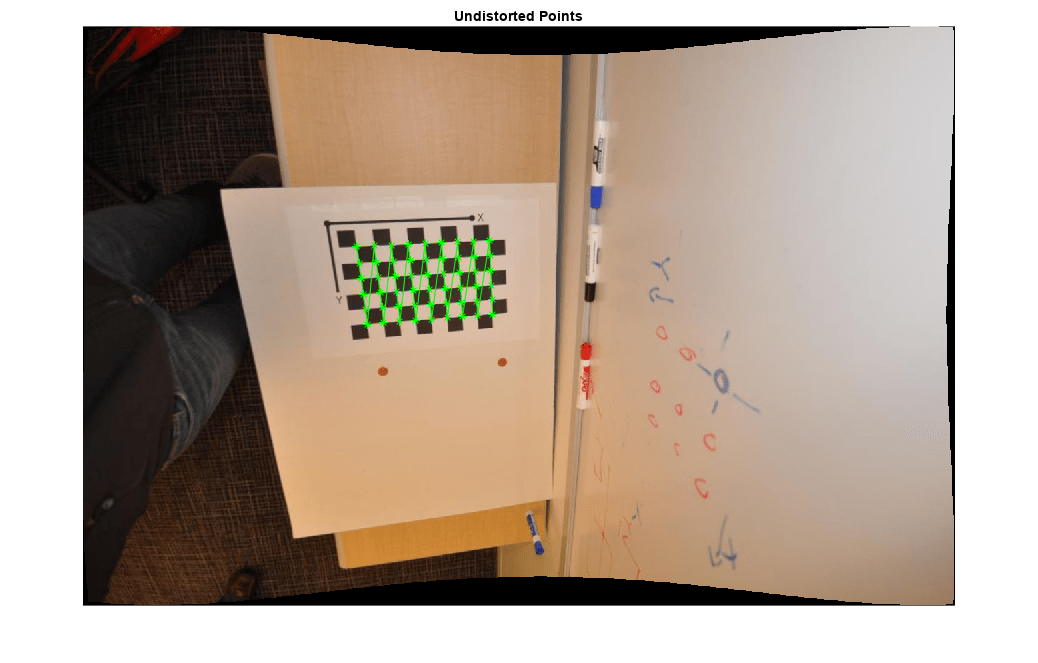
Undistort the image.
[J, newIntrinsics] = undistortImage(I,intrinsics,OutputView="full");Translate undistorted points
newOrigin = intrinsics.PrincipalPoint - newIntrinsics.PrincipalPoint;
undistortedPoints = [undistortedPoints(:,1) - newOrigin(1), ...
undistortedPoints(:,2) - newOrigin(2)];Display the results
figure; imshow(I); hold on; plot(points(:,1),points(:,2),"r*-"); title("Detected Points"); hold off;
figure; imshow(J); hold on; plot(undistortedPoints(:,1),undistortedPoints(:,2),"g*-"); title("Undistorted Points"); hold off;
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2014bSee Also
Apps
Functions
estimateCameraParameters|triangulate|undistortImage|estimateExtrinsics|cameraProjection|estimateFisheyeParameters|plotCamera|img2world2d|world2img|extr2pose|pose2extr