6DOF
Implement six-degrees-of-freedom equations of motion in simulations, using
Euler angles and quaternion representations
Model and simulate point mass and six-degrees-of-freedom dynamics of fixed or variable mass atmospheric flight vehicles. Define representations of the equations of motion in body, wind, and Earth-centered, Earth-fixed (ECEF) coordinate systems. Transform between coordinate systems and perform unit conversions to ensure model consistency.
Blocks
| 6DOF (Euler Angles) | Implement Euler angle representation of six-degrees-of-freedom equations of motion |
| 6DOF (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion with respect to body axes |
| 6DOF ECEF (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion in Earth-centered Earth-fixed (ECEF) coordinates |
| 6DOF Wind (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion with respect to wind axes |
| 6DOF Wind (Wind Angles) | Implement wind angle representation of six-degrees-of-freedom equations of motion |
| Custom Variable Mass 6DOF (Euler Angles) | Implement Euler angle representation of six-degrees-of-freedom equations of motion of custom variable mass |
| Custom Variable Mass 6DOF (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of custom variable mass with respect to body axes |
| Custom Variable Mass 6DOF ECEF (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of custom variable mass in Earth-centered Earth-fixed (ECEF) coordinates |
| Custom Variable Mass 6DOF Wind (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of custom variable mass with respect to wind axes |
| Custom Variable Mass 6DOF Wind (Wind Angles) | Implement wind angle representation of six-degrees-of-freedom equations of motion of custom variable mass |
| Simple Variable Mass 6DOF (Euler Angles) | Implement Euler angle representation of six-degrees-of-freedom equations of motion of simple variable mass |
| Simple Variable Mass 6DOF (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of simple variable mass with respect to body axes |
| Simple Variable Mass 6DOF ECEF (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of simple variable mass in Earth-centered Earth-fixed (ECEF) coordinates |
| Simple Variable Mass 6DOF Wind (Quaternion) | Implement quaternion representation of six-degrees-of-freedom equations of motion of simple variable mass with respect to wind axes |
| Simple Variable Mass 6DOF Wind (Wind Angles) | Implement wind angle representation of six-degrees-of-freedom equations of motion of simple variable mass |
Topics
- Fundamental Coordinate System Concepts
Define coordinate systems when working with the Aerospace Blockset™ software.
Featured Examples
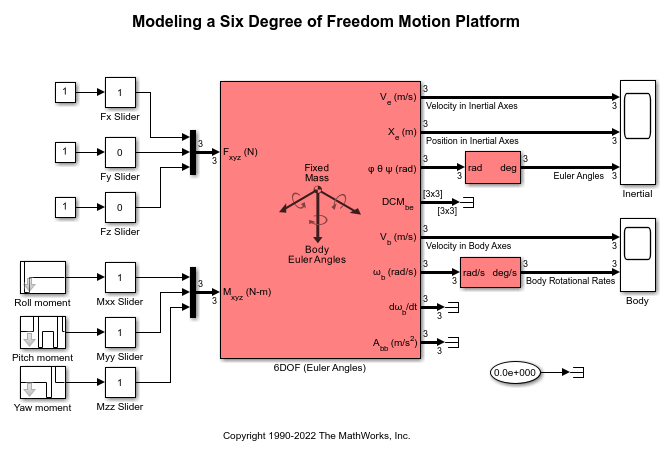
Modeling a Six Degree of Freedom Motion Platform
Connect inputs and outputs of a six degree of freedom equation of motion block.
New

Model Package Delivery with Custom Variable Mass 6DOF Block
Implement a small multicopter simulation to take off, fly, and land in a city environment.