6DOF Wind (Quaternion)
Implement quaternion representation of six-degrees-of-freedom equations of motion with respect to wind axes
Libraries:
Aerospace Blockset /
Equations of Motion /
6DOF
Description
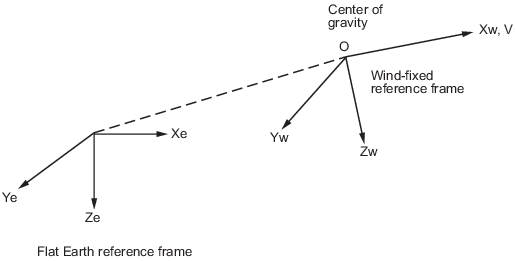
The 6DOF Wind (Quaternion) block considers the rotation of a wind-fixed coordinate frame (Xw, Yw, Zw) about an flat Earth reference frame (Xe, Ye, Ze). For more information on the wind-fixed coordinate frame, see Algorithms.
Aerospace Blockset™ uses quaternions that are defined using the scalar-first convention.
Limitations
The block assumes that the applied forces act at the center of gravity of the body, and that the mass and inertia are constant.
Ports
Input
Output
Parameters
Algorithms
The origin of the wind-fixed coordinate frame is the center of gravity of the body, and the body is assumed to be rigid, an assumption that eliminates the need to consider the forces acting between individual elements of mass. The flat Earth reference frame is considered inertial, an excellent approximation that allows the forces due to the Earth's motion relative to the “fixed stars” to be neglected.
The translational motion of the wind-fixed coordinate frame is given below, where the applied forces [Fx Fy Fz]T are in the wind-fixed frame, and the mass of the body m is assumed constant.
The rotational dynamics of the body-fixed frame are given below, where the applied moments are [L M N]T, and the inertia tensor I is with respect to the origin O. Inertia tensor I is easier to define in body-fixed frame.
The integration of the rate of change of the quaternion vector is given below.
References
[1] Stevens, Brian, and Frank Lewis. Aircraft Control and Simulation. New York: John Wiley & Sons, 1992.
Extended Capabilities
Version History
Introduced in R2006a
See Also
6DOF (Euler Angles) | 6DOF (Quaternion) | 6DOF ECEF (Quaternion) | 6DOF Wind (Wind Angles) | Custom Variable Mass 6DOF (Euler Angles) | Custom Variable Mass 6DOF (Quaternion) | Custom Variable Mass 6DOF ECEF (Quaternion) | Custom Variable Mass 6DOF Wind (Quaternion) | Custom Variable Mass 6DOF Wind (Wind Angles) | Simple Variable Mass 6DOF ECEF (Quaternion) | Simple Variable Mass 6DOF (Euler Angles) | Simple Variable Mass 6DOF (Quaternion) | Simple Variable Mass 6DOF Wind (Quaternion) | Simple Variable Mass 6DOF Wind (Wind Angles)