Calibrate Cameras
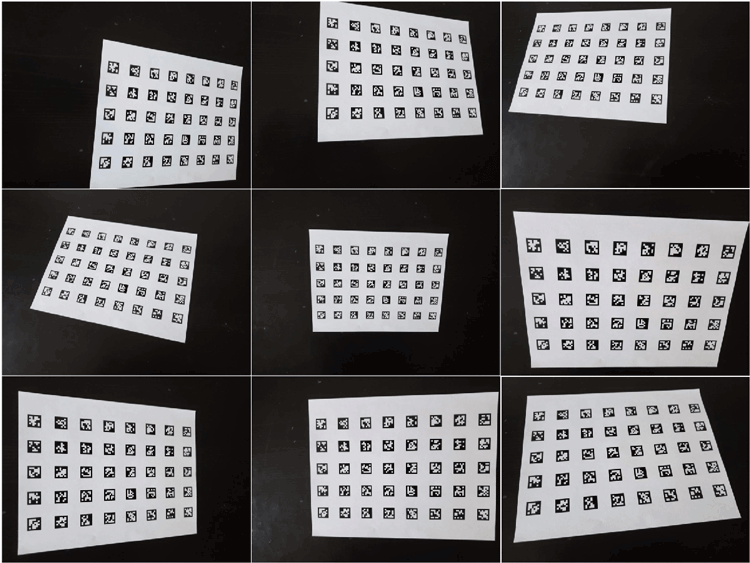
Camera calibration is the process of estimating camera parameters by using images that contain a calibration pattern. The parameters include camera intrinsics, distortion coefficients, and camera extrinsics. Use these camera parameters to remove lens distortion effects from an image, measure planar objects, reconstruct 3-D scenes from multiple cameras, and perform other computer vision applications.
Click an illustration to view its topic.
Fisheye camera calibration extends this process by estimating parameters and distortion coefficients specific to fisheye lenses, which is essential for correcting extreme distortion and accurately mapping image points to real-world coordinates in applications such as SLAM, odometry, surveillance, VR, and image stitching. Multi-camera calibration ensures that all cameras in a system share a consistent understanding of scene geometry, enabling tasks like 3-D motion capture, reconstruction, and photogrammetry, while robot hand-eye calibration determines the spatial relationship between a robot arm and a camera for precise visual servoing and interaction. You can use the Camera Calibrator app and functions for single-camera intrinsics, extrinsics, and distortion, the Stereo Camera Calibrator app and functions for stereo parameters and relative orientations, and dedicated fisheye calibration functions for distortion removal and accurate wide-angle 3-D reconstruction.
Apps
| Camera Calibrator | Estimate geometric parameters of a single camera |
| Stereo Camera Calibrator | Estimate geometric parameters of a stereo camera |
Functions
Topics
- What Is Camera Calibration?
Estimate the parameters of a lens and image sensor of an image or video camera.
- What Is Robot Hand-Eye Calibration?
Understand moving- and stationary- robot camera configurations for hand-eye calibration.
- What Is Multi-Camera Calibration?
Estimate position and orientations of cameras in a multi-camera system.
- Fisheye Calibration Basics
Fisheye camera model and calibration in MATLAB.
- Using the Single Camera Calibrator App
Prepare camera calibration images and estimate camera intrinsic parameters.
- Using the Stereo Camera Calibrator App
Calibrate a stereo camera, which you can then use to recover depth from images.
- Calibration Patterns
Camera Calibration using a checkerboard, circle grid, or custom detector pattern.
- Prepare Camera and Capture Images for Camera Calibration
Set up your camera and capture camera calibration images to use with the calibrator app.
- Prepare Cameras and Capture Images for Multi-Camera Calibration
Set up your camera and capture camera calibration images for multi-camera calibration.
- Point Feature Types
Choose functions that return and accept points objects for several types of features.
- Coordinate Systems
Specify pixel Indices, spatial coordinates, and 3-D coordinate systems.
Featured Examples
3-D Motion Reconstruction Using Multiple Cameras
Reconstruct 3-D motion of an object for use in a motion capture system consisting of multiple cameras.
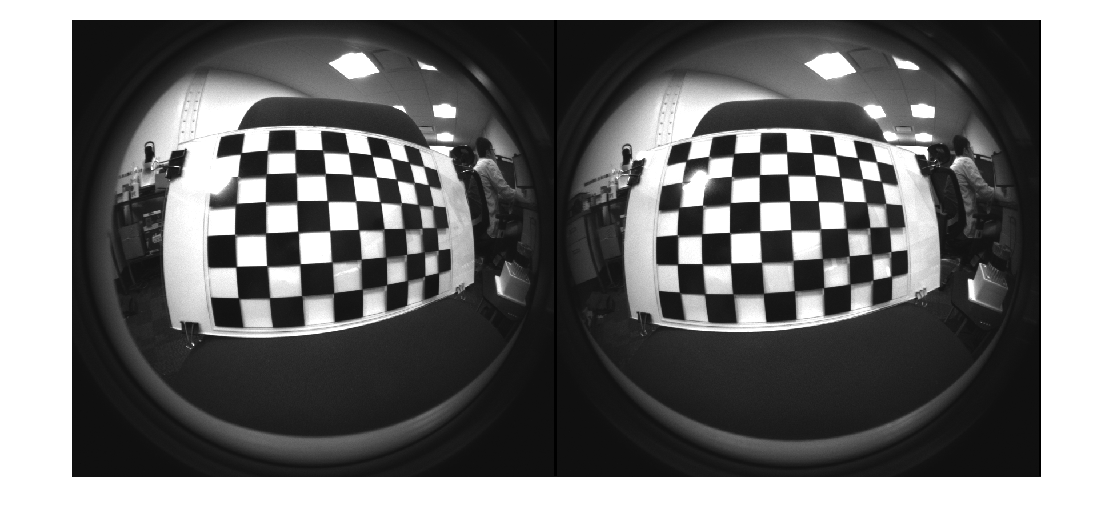
Stereo Fisheye Camera Calibration
Calibrate a stereo fisheye camera by determining each camera's intrinsic parameters and estimate the baseline between them.
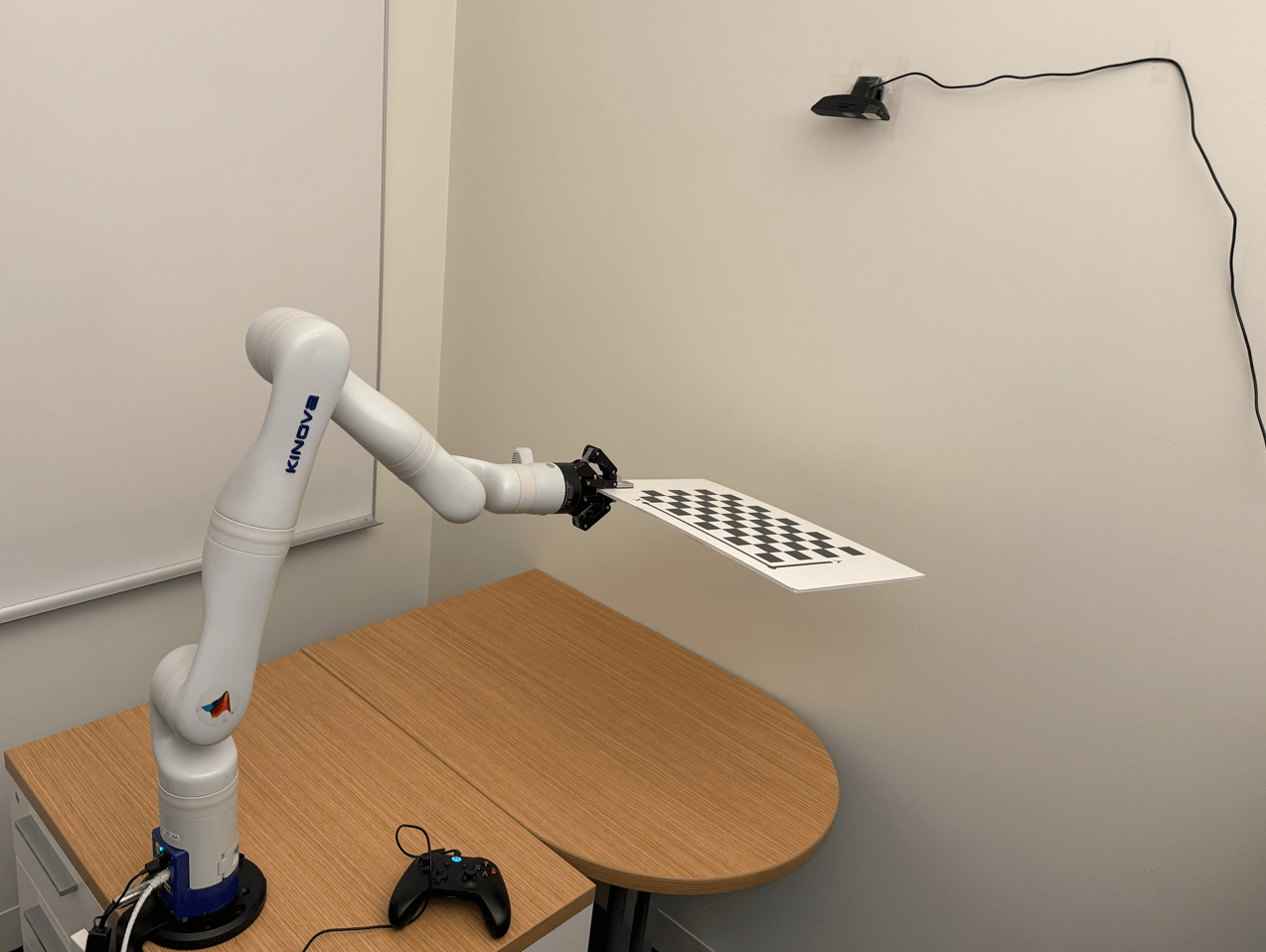
Estimate Pose of Moving Camera Mounted on a Robot
Perform and verify hand-eye calibration for a robot arm equipped with a camera.
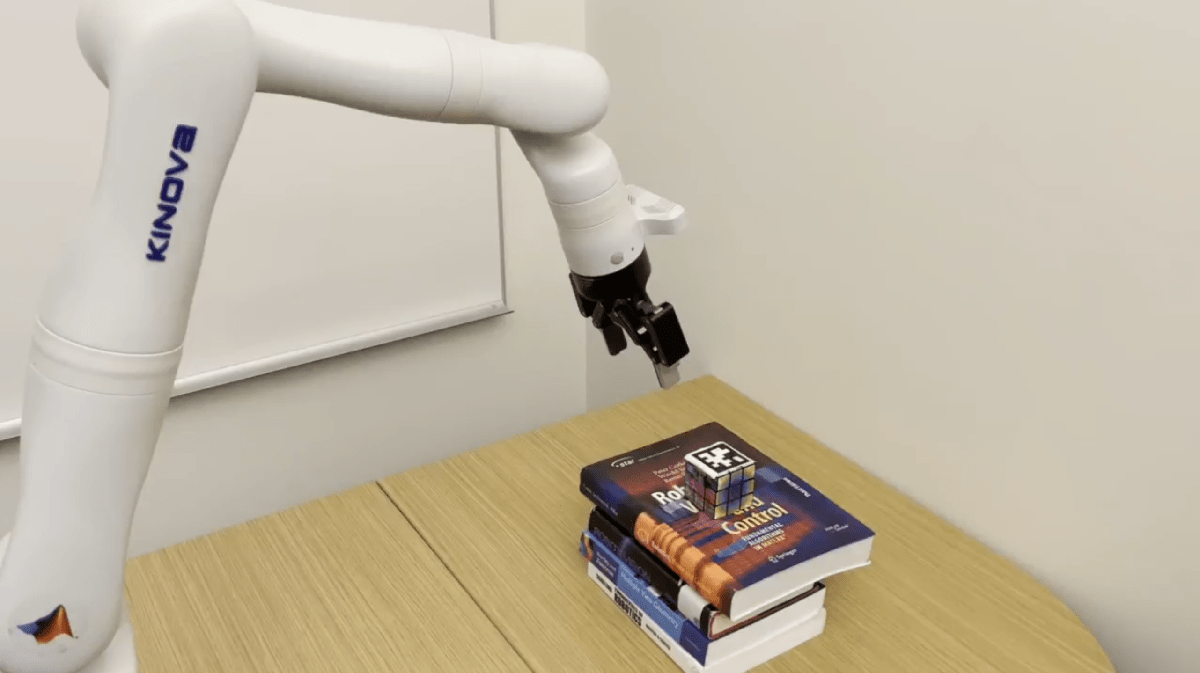
Estimate Pose of Fixed Camera Relative to Robot Base
Estimate the camera intrinsics for a fixed camera using hand-to-eye calibration.
Camera Calibration Using Custom Planar Calibration Patterns
Detect and localize AprilTags in a calibration pattern.
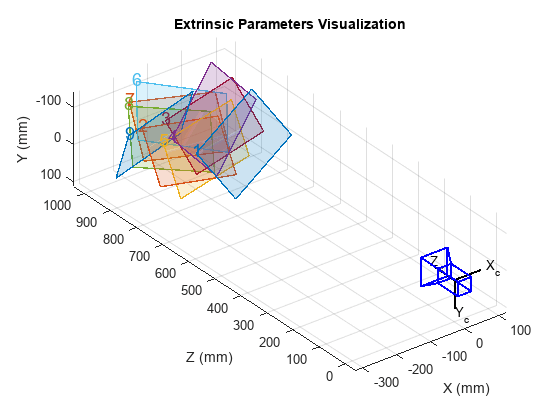
Evaluating the Accuracy of Single Camera Calibration
Evaluate the accuracy of estimated camera parameters.
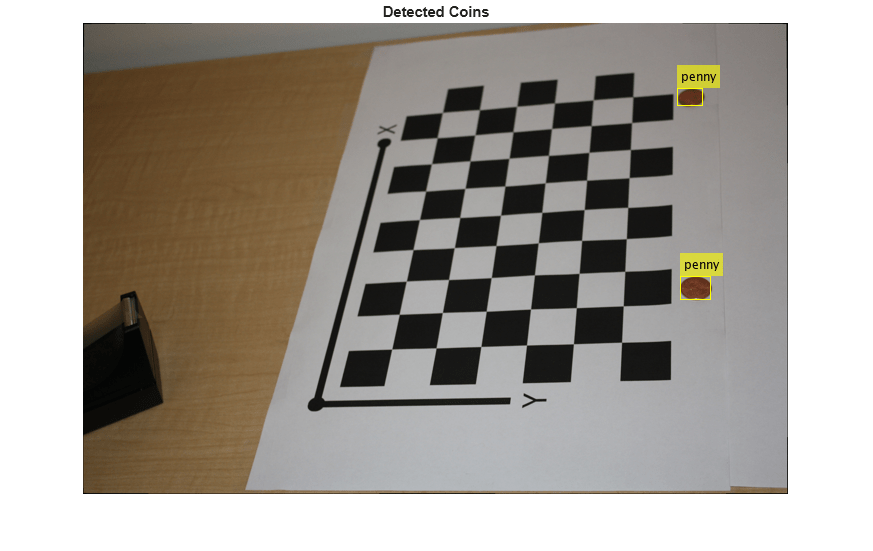
Measuring Planar Objects with a Calibrated Camera
Measure the diameter of coins in world units using a single calibrated camera.

Configure Monocular Fisheye Camera
Convert a fisheye camera model to a pinhole model.