
Function to Convert between DCM, Euler angles, Quaternions, and Euler vectors
Function to convert rotation data between 4 types: DCM, Euler Angles, Quaternions, and Euler Param.
SpinCalc is a consolidated matlab function that will convert any rotation data between the 4 types included. Will also convert between 2 different Euler angle set types.Multiple orientations can be
- 15.3K (All time)
- 5 (Last 30 days)
- 4.8 / 5
- Community
-
25 Jan 2013

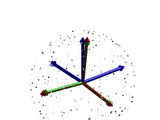
Understanding the Euler Angles
This is for visualizing the Euler Angles and better understanding of it
path,plane of rotation,initial co-ordinate frame,etcDescription in short: : An Educating tool.Files:Understanding_Euler_Angles.m -- Main programarrow3d.m -- Function to generate the 3d arrowRotations.m --
- 11.2K (All time)
- 2 (Last 30 days)
- 4.3 / 5
- Community
-
12 Oct 2006

Graphical display of Euler and Fixed Angles
Easy to use GUI that gives Euler angles for different rotation matrices and gives rotation matrices for different Euler angles. Also it animates the angle rotations one by one for more understanding.
- 4.3K (All time)
- 1 (Last 30 days)
- 4.9 / 5
- Community
-
9 Jan 2011
- 1.5K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
28 Aug 2019

- 43.5K (All time)
- 12 (Last 30 days)
- 4.9 / 5
- Community
-
28 Feb 2022
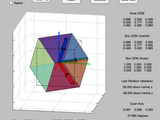
An interactive demo for learning and visualizing 3D coordinate transformations and Euler angles.
findEulerAngs generates Euler angle sets and animates rotations in response to user manipulation of a 3D rigid body (a box).Use the mouse to change the orientation of the box. A wireframe of the
- 1.9K (All time)
- 1 (Last 30 days)
- 4.3 / 5
- Community
-
5 May 2011
Virtual reality drawing with android device
use your android mobile phone to draw in 3D space like using virtual reality sets
- 212 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
27 May 2017
- 11.4K (All time)
- 24 (Last 30 days)
- 4.9 / 5
- Community
-
1 Aug 2024

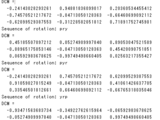
Euler angle, DCM, Quaternion, and Euler Vector Conversion/Teaching GUI
A GUI that helps users learn how Euler angles and other rotational data relate to one another.
This is an instructional GUI to be used for learning how Euler angles, DCMs, quaternions, and Euler vector parameters relate in the rotation of cartesian frames (A to B). Can also be used to convert
- 8.8K (All time)
- 9 (Last 30 days)
- 4.3 / 5
- Community
-
12 Sep 2012

Animate sets of Euler rotations using arbitrary Euler angles and rotation order.
[coordSys,as] = animEuler(h,rotSet,angs) animates the rotation of a dextral coordinate system using three arbitrary Euler angles (angs) about three axes (rotSet) in figure (h). rotSet is an array of
- 2.4K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
29 Apr 2009
Computes DCM from Euler angles for six basic sequence of rotations around X(Roll), Y(Pitch), Z(Ya)
Computes Direction Cosine Matrix from Euler angles (in radians) for six basic sequence of rotations around X(Roll),Y(Pitch) and Z(Yaw) axis. Allowed rotations sequences: xyz, xzy, yxz, yzx, zxy
- 4.8K (All time)
- 1 (Last 30 days)
- 4.0 / 5
- Community
-
9 Jul 2009

Rigid motions and robotics toolbox
3D rigid transforms and robotics with quaternions and dual quaternions (OO interface)
This toolbox provides a set of functions for modelling 3-D rigid motions includingEuler angles, rotation and homogeneous matrixes, quaternions and dual quaternions, andaxis/angle representations
- 1.3K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
28 Mar 2017

Huygens-Fresnel integral approximation on the GPU
Simulate electromagnetic wave propagation through free-form apertures, or off rough surfaces. Speed up the computation by using the GPU.
- 1.9K (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
23 Oct 2020
- 673 (All time)
- 2 (Last 30 days)
- 4.8 / 5
- Community
-
5 Jan 2016

3D rototraslations, Kinematics and Dynamics of multibody systems (Robotics and Biomechanics)
topics covered by the library are: transformation matrices (rototranslations) velocity, acceleration, force, momentum matrices Cardan/Euler angles basic operations on matrices, vectors, planes, lines and
- 10.8K (All time)
- 1 (Last 30 days)
- 4.6 / 5
- Community
-
1 Nov 2009

Numerical solution of gyroscope-gyrocompass Lagrange equations
The mfile 'gyroscope_plot' produces:-Generalized coordinates, velocities/time (euler angles 313)-Phase subspaces-State space -Energies/time-Generalized momenta/time-Simulation: symmetry axis pathThe
- 1.5K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
17 Jan 2013

Eular angles visualization and connection with axis-angle rotation.
It is part of Quaternions visualizations project: http://quaternion.110mb.com/ Author: http://simulations.narod.ru/ It makes visualization of rotation with Euler angles. phi theta psi are
- 3.5K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
10 May 2009
Quaternions from Euler Angles,Euler axis and angle
Quaternions from Euler Angles. Euler principal rotation angle and Euler axis of rotation.
Quaternions from Euler Angles. Euler principal rotation angle and Euler axis of rotation.
- 615 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
10 Dec 2012

Euler Angles and Rates from gyroscope Data
a simple Block to Calculate Euler Angles and Euler Rates From Raw Angular Velocities
Nothing Special :DJust uploaded it to save you a few minutes a simple block that can calculates Euler Angles Rates(Rad/s) and Euler Angles(Rad) from discrete Angular Velocities sample by
- 318 (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
24 May 2020
Euler Angles, Orthogonal transformations, Direction cosine matrix
Calculate Euler angles from Given direction cosine matrix.
Given direction cosine matrix of an orthogonal transformation from XYZ to xyz is Q. Find the Euler angles fi , theta and psi for this transformation. For more examples visit www.smallsats.org
- 664 (All time)
- 1 (Last 30 days)
- 3.0 / 5
- Community
-
21 Dec 2012

- 27 (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
17 May 2023
Euler-angle-based-rotation-matrix
In this program the ZYX euler angle sequence is used to simulate a platform fixed at some constant height. The rotation is done [-45 45] abo
In this program the ZYX euler angle sequence is used to simulate a platform fixed at some constant height. The rotation is done [-45 45] about axis. [-45 45] about y axis. 3D simulation is included
- 156 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
18 Jun 2021

Stabilization of miniature satellit
Program focuses on the issue of stabilization of the CubeSat satellite after launch into orbit. Magnetorquers were used for stabilization.
- 257 (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
11 May 2021
Euler angles to Quaternion Conversion (for six basic sequence of rotations)
Allowed rotations sequences: xyz, xzy, yxz, yzx, zxy, zyx
Euler Angles To Quaternion Conversion for six basic sequence of rotations around X(Roll),Y(Pitch) and Z(Yaw) axis. Allowed Sequences: xyz, xzy, yxz, yzx, zxy, zyx.
- 8.2K (All time)
- 2 (Last 30 days)
- 3.2 / 5
- Community
-
17 Jul 2009
Direction Cosine Matrix to Euler´s angles
Take as input a "direction cosine matrix" and output Euler angles (for Z-Y-X sequence)
Input matrix is 3x3.It only works for the "Z-Y-X" sequence. The function "dcm2angle" is available in Matlab 2012b in Airspace toolbox which also enable other sequences. But if you don't have acces to
- 703 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
18 Jan 2013
The code for solving Wahba's problem
Code for testing Davenport's (eigen-valued) and Markley's (SVD) solutions to Wahba's problem - 1965
- 2K (All time)
- 4 (Last 30 days)
- -- / 5
- Community
-
24 Mar 2014
orientation_estimation_sensor_fusion_algorithm_codes
MATLAB implementations of 10 sensor fusion algorithms for orientation estimation using magneto-inertial measurement units (MIMU).
- 309 (All time)
- 3 (Last 30 days)
- -- / 5
- Community
-
10 Jun 2021

Real time EKF Attitude Estimation for Simulink
Real-time EKF Attitude Estimation for SimulinkUsing the attached Simulink Model, You can use a real-time Accelerometer, Gyroscope, Magnetometer from any source you have to estimate the Euler angles
- 660 (All time)
- 7 (Last 30 days)
- -- / 5
- Community
-
20 Nov 2020
Computes the Euler angles (phi1,Phi,phi2) with Bunge convention from rotation matrices.
Computes the Euler angles (phi1,Phi,phi2) with Bunge convention from rotation matrices.It works on arrays of size [3 3] and [3 3 P]. In the latter case, the transformations are performed
- 63 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
31 Jan 2020
compose / decompose 3x3 rotation matrix (comp_decomp_matrix)
Compose 3x3 rotation matrix from euler angles or decompose 3x3 rotation matrix to euler angles
COMP_DECOMP_MATRIX: compose 3x3 rotation matrix from euler angles (in degrees) or decompose 3x3 rotation matrix to euler angles (in degrees)Input: 1x3 vector of euler rotations around x rotations(1
- 618 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
15 Oct 2013

Quaternions, Euler angles and Rodrigues parameters transformations library
Quaternions, Euler angles and Rodrigues parameters transformation libraryThe following list accounts for the problem variablestheta: rotation angle [rad]e: axis vector [e1;e2;e3]R: associated
- 39 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
7 Nov 2020
Projectile Simulation with aerodynamic drag
Euler's method is used to simulate the flight of a drag force influenced projectile, launched at a specified height, velocity and angle.
This is a popular project assignment for students who are studying Numerical Methods with Matlab.The equations solved are a set of first-order nonlinear differential equationsby using Euler’s method
- 571 (All time)
- 5 (Last 30 days)
- 5.0 / 5
- Community
-
6 Jan 2020
Plotting variation of power angle to time using Modified Euler Method
The system characteristics of power angle is plotted before, during and after a fault
- 294 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
13 Apr 2015

Real/Complex Spherical Harmonic Transform, Gaunt Coefficients and Rotations
A small collection of routines for the Spherical Harmonic Transform and Gaunt coefficients.
rotated to some direction (\theta_0, \phi_0), or the more complex case of arbitrary functions were full rotation matrices are constructed from Euler angles. The algorithm used is according to the recursive
- 4.1K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
20 Jun 2023

The plotting the body frame rotation with respect to the inertial frame by Euler angle of sequence yaw-pitch-roll.
%% This Code is prepared by MAHENDRA GEHLOT %%This is to demonstrat of plotting the body frame rotation with respect to the inertial frame by euler angle of sequence yaw-pitch-roll or 3-2-1;Along
- 57 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
5 Oct 2021

This toolbox deals with basic concepts in kinematics and special interpolation algorithms.
- 2K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
29 Mar 2010

Calcuate Euler Angles from Rotation Matrix
This function return the rotation along x,y and z direction from a 3x3 Rotation Matrix
- 2.4K (All time)
- 2 (Last 30 days)
- 1.7 / 5
- Community
-
2 Apr 2012
Quaternions to Euler angles conversion
Convert quaternions to Euler angles using Z-Y-X rotation sequence
Convert quaternions to Euler angles. Note that the Euler angles are different for different rotation sequence. The Euler angles rotation sequence used in this code is z-y'-x'' (yaw, pitch, roll). The
- 251 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
14 Apr 2020

Euler angles to axis-angle vector conversion for Simulink 3D
Calculate the corresponding axis-angle vector for given Euler angles
The MATLAB function calculates the corresponding axis-angle vector for given Euler angles. The axis-angle vector is used to specify rotations in the Simulink 3D Animation. The function can be put
- 59 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
4 Jan 2021

Aircraft Attitude Estimation- Euler angles / Quaternions
This MATLAB Simulink project computes Euler angles and quaternions from rate gyro data using Euler and Poisson kinematic equations.
# GyroToEuler-Quaternion-SimThis MATLAB Simulink project estimates Euler angles and quaternions from rate gyro data. Using Euler and Poisson kinematic equations, the model computes attitude
- 23 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
17 May 2025

Use the Euler-Lagrange equation to derive differential equations
Use the Euler-Lagrange tool to derive differential equations based on the system Lagrangian. The Lagrangian is defined symbolically in terms of the generalized coordinates and velocities, and the
- 6.8K (All time)
- 6 (Last 30 days)
- 4.5 / 5
- Community
-
24 Oct 2016
Rotation-based Camera Calibration using a Linear Method
Rotation-based Camera Calibration using a Linear Method
- 119 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
22 Feb 2017
angle2dcm3(rot1, rot2, rot3, order)
Converts euler angles to dcm based on order specified.
The function converts euler angles to 3 x 3 direction cosine matrix. The order of rotation is specified as 'ZYX', 'XYZ' , etc. In right handed system, clockwise rotation about an axis while looking
- 204 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
26 Jun 2015
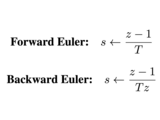
Euler c2d Transformations (c2d_euler)
Transforms a continuous transfer function to a discrete transfer function using the forward and backward Euler methods.
c2d_euler Transforms a continuous transfer function to a discrete transfer function using the forward and backward Euler methods.SyntaxHz = c2d_euler(Hs,T,type) Hz =
- 1.5K (All time)
- 11 (Last 30 days)
- 5.0 / 5
- Community
-
16 Jul 2024
Extract cardan or Euler angles from a matrix
Get the angles from an hypermatrix of rotation (3 x 3 x nFrames). Returns the angles as column vectors (nAngles x nFrames). The sequence can be any combination of angles up to 3 angles written in
- 58 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
25 Jul 2019

- 236 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
16 Feb 2016
rotateXLabels( ax, angle, varargin )
Rotate x-tick labels to any angle, preserving font settings and coping with resize, zoom, pan etc
NB: As of R2014b this functionality is built into MATLAB axes using the 'XTickLabelRotation' property.This function rotates the x-tick labels on a plot. An arbitrary angle can be specified for the
- 21.9K (All time)
- 1 (Last 30 days)
- 4.7 / 5
- Community
-
1 Sep 2016

Quaternion Attitude Representation for Small Satellite
Quaternion Attitude Representation for Small Satellite Transformed from Euler Angles
The subject of the program is to characterize the attitude dynamics of the Low Earth Orbit Satellite in terms of quaternions. Euler angles and angular velocity vectors taken from the first program
- 87 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
6 Jul 2022

Find angles of triangle and/or quadrilateral when vertices are given.
Three functions TRIangles, QUADangles and FIndAngles are given to find the angles of triangle and quadrilateral when vertices are known. TRIangles needs vertices in order 3X2 to calculate its
- 837 (All time)
- 1 (Last 30 days)
- 4.5 / 5
- Community
-
3 Jul 2012

Spongebob Squarepants goes 3-D
GUI demonstration of different representations of 3-D rotations
matrix, Euler angles in arbitrary sequences, axis-angle, or quaternions. The 3-D view on the rigth-hand side will render a customizable view of the rotation illustrated by one of the Spongebob Squarepants
- 249 (All time)
- 4 (Last 30 days)
- 5.0 / 5
- Community
-
22 Jan 2018
Solve Euler–Lagrange equation automatically.
- 2.6K (All time)
- 1 (Last 30 days)
- 4.8 / 5
- Community
-
1 Sep 2016

- 968 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
20 Jan 2022

EulerRotationMatrix(RotationAxis, Angle, AngleUnits, DebugFlag)
Matrix Utilities: Euler Rotation Matrices
axis of rotation EXAMPLE: R = EulerRotationMatrix(rotationAxis, Angle, AngleUnits, DebugFlag); R = EulerRotationMatrix('x', 60, 'D'); % Rotate by 60 degs about x-axis R =
- 150 (All time)
- 1 (Last 30 days)
- 3.0 / 5
- Community
-
12 Aug 2017

Analytical solution for Euler-Bernoulli beam with n simple supports.
The live script getEulerBernoulliExamples.mlx shows the exemplary use of the live function getEulerBernoulliFunction.mlx.The live function getEulerBernoulliFunction.mlx returns beam displacement and
- 532 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
8 May 2024

- 2.8K (All time)
- 2 (Last 30 days)
- 3.9 / 5
- Community
-
20 Jan 2022
Simulate Brownian particle motion by the Euler–Maruyama method
, solutions arise under an initial condition and boundary conditions. Therefore solutions of stochastic differential equations exist and are unique (see app.). For this simulation, the Euler–Maruyama (EM
- 1K (All time)
- 5 (Last 30 days)
- 5.0 / 5
- Community
-
14 Nov 2018
A function that solves the Euler-Lagrange Equations using the Symbolic Math Toolbox.
A function that solves the Euler-Lagrange Equations using the Symbolic Math Toolbox. It comes with three examples: 1) a generic point-mass model, 2) a 6-DOF quadrotor model and 3) an inverted
- 689 (All time)
- 3 (Last 30 days)
- 5.0 / 5
- Community
-
7 Jul 2021
Simple method for interpolating a sequence of angles
This routine uses unwrap and interp1 to enable interpolation of a sequence of angles given in deg. It accounts for wrapping and returns results in the range [-180 to 180].
- 200 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
3 Dec 2017
3D rotation matrix class
The class RotationMatrix allows to handle a 3D rotation matrix with different parametrizations: - a [3x3] rotation matrix - Euler angles - exponential map - quaternions Once a RotationMatrix instance
- 824 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
29 Jul 2015